I2C实验
硬件分析
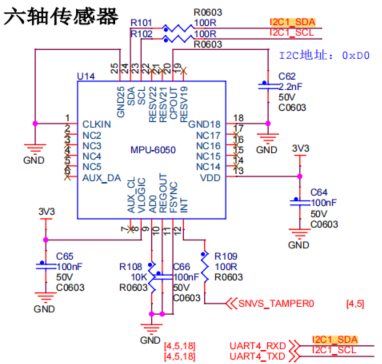
mpu6050
AP3216C
触摸ic
I2C简介
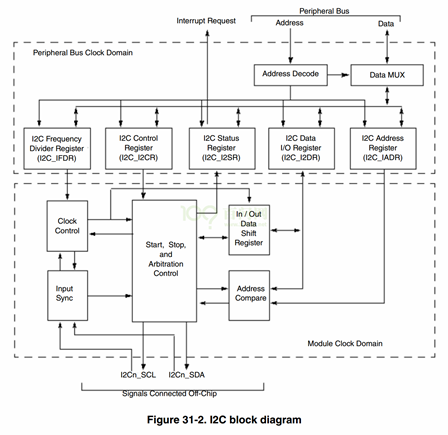
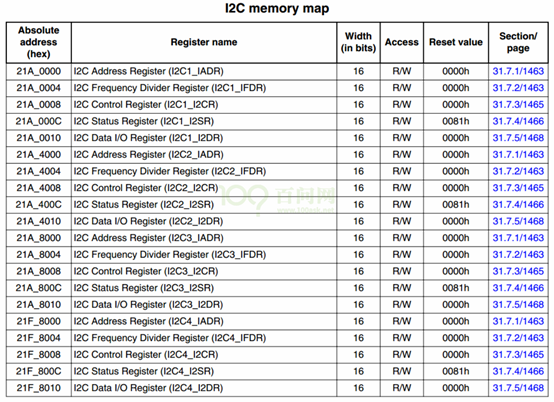
I.MX6U 提供了4 个I2C 外设,支持两种模式:标准模式和快速模式,标准模式下 I2C数据传输速率最高是 100Kbits/s,在快速模式下数据传输速率最高为 400Kbits/s。每个I2C控制器有5个16-bit 的寄存器。结构图如下所示:
I2C 寄存器
各个I2C单元的寄存器地址如下:
地址寄存器 I2Cx_IADR
I2Cx_IADR(x=1~4,下面也是如此,不在累赘)寄存器,这是I2C的地址寄存器,寄存器 I2Cx_IADR只有 ADR(bit7:1)位有效,用来保存 I2C从设备地址数据。当我们要访问某个 I2C从设备的时候就需要将其设备地址写入到 ADR里面。寄存器结构如图:

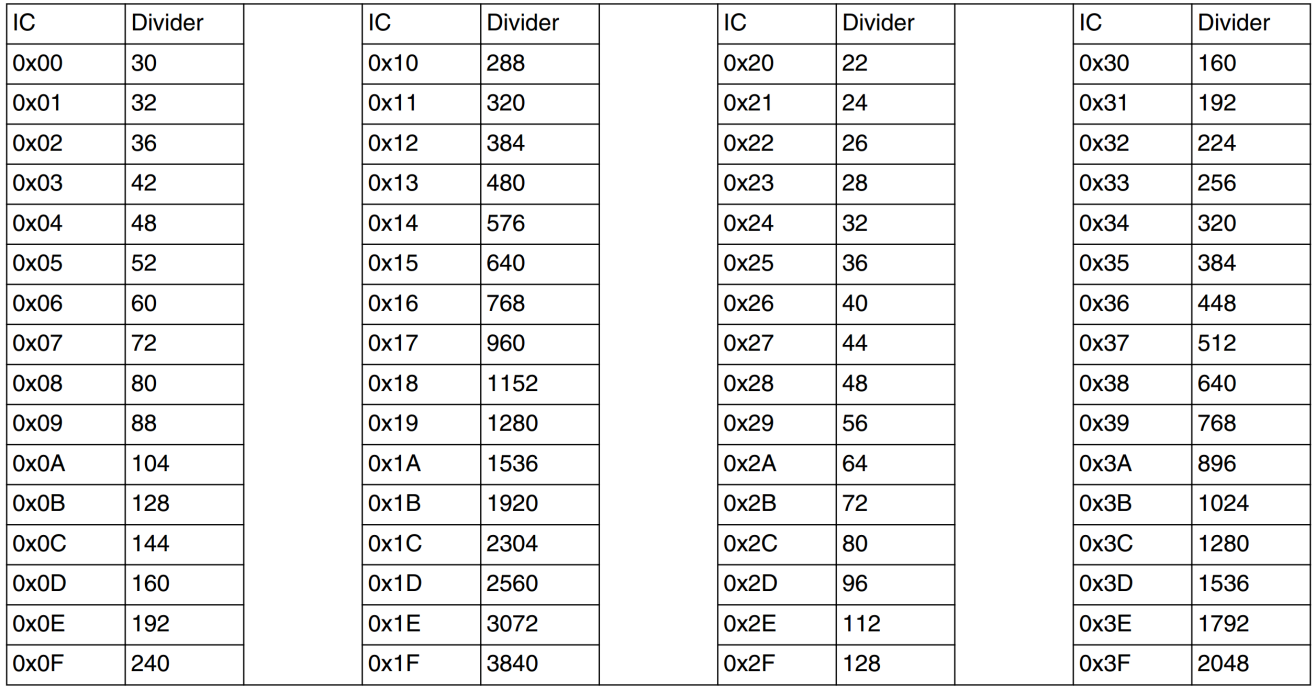
分频寄存器I2Cx_IFDR
寄存器 I2Cx_IFDR也只有 IC(bit5:0)这个位,用来设置 I2C的波特率, I2C的时钟源可以选 择 IPG_CLK_ROOT=66MHz,通过设置 IC位既可以得到想要的 I2C波特率。

I2C时钟树如下:
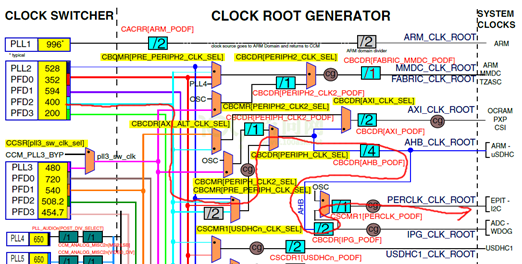
根据
bsp_clk.c里面的imx6u_clkinit函数得到PLL2_PFD2是396M,AHB_PODF是3,IPG_PODF是2,PERCLK_PODF是1,如下,参见代码【i2c_ap3216c】工程。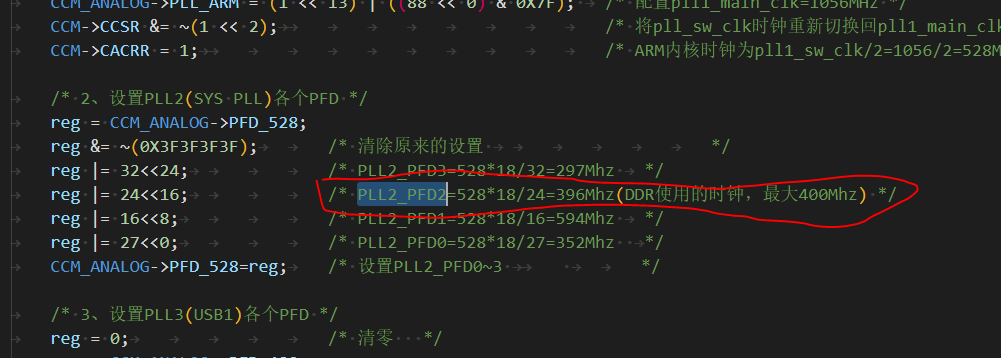
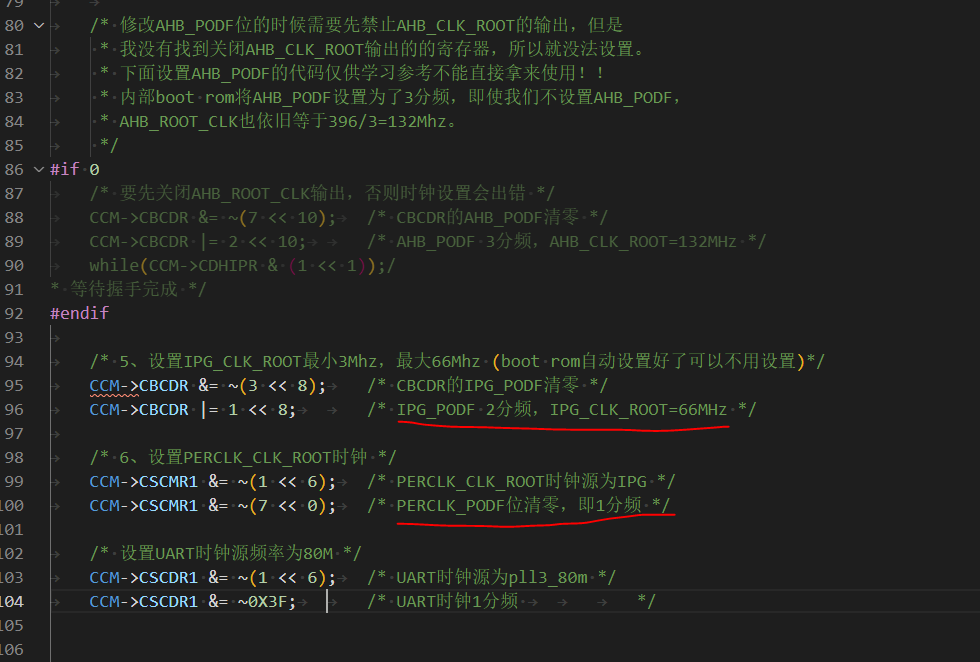
所以,计算 PER_CLK_ROOT过程如下: PLL2 = 528 MHz PLL2_PFD2 = 528 * 18 / 24 = 396 MHz IPG_CLK_ROOT = (PLL2_PFD2 / AHB_PODF )/ IPG_PODF = (396 MHz/3)/2 = 66 MHz PER_CLK_ROOT = IPG_CLK_ROOT/PERCLK_PODF = 66 MHz/1 = 66 MHz 我们要设置 I2C的波特率100KHz,那么 IC = 66000000/100000 =660, 查询IC表可知,和660最接近的IC值为0x15
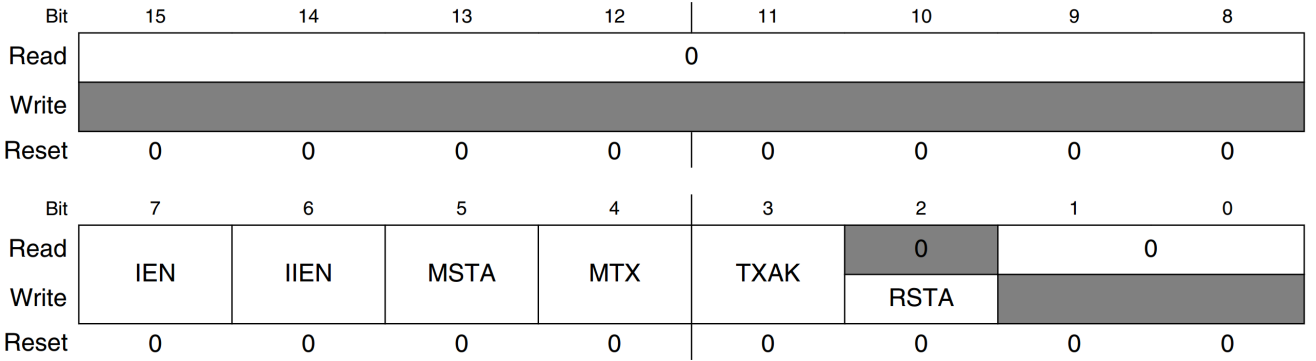
控制寄存器I2Cx_I2CR
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [7] | IEN | R/W | I2C使能, 0:I2C控制器被禁止,但是还可以访问它的寄存器; 1:I2C控制器使能,要想让本寄存器中其他位起效,此位必须先置1 |
| [6] | IIEN | R/W | I2C中断使能, 0:I2C中断禁止,但是中断状态位(I2C_I2SR[IIF])还是可以使用的; 1:I2C中断使能,发生中断时,中断状态位(I2C_I2SR[IIF])也会被设置 |
| [5] | MSTA | R/W | 主从模式选择, 0:从设备模式,MSTA从1变0时,会发出STOP信号,并变为从设备模式; 1:主机模式,MSTA从0变1时,会发即STAT信号,并变为主机模式。 注意1:I2C主设备失去总线时,硬件会清除此位,但是不会发出STOP信号 注意2:要修改此位时,要先提供I2C控制器时钟 注意3:软件清除此位时,会发出STOP信号;如果失去总线,硬件会清除此位 |
| [4] | MTX | R/W | 发送/接收模式, 0:接收模式, 1:发送模式。 作为主机时,应该根据数据传输的方向设置MTX位,当然,发送I2C设备地址时MTX总是1。 |
| [3] | TXAK | R/W | 发送响应使能,当I2C设备处于接收状态时,此位才有效, 0:在第9个时钟,发送响应信号,即把SDA拉低; 1:在第9个时钟,不发送响应信号 |
| [2] | RSTA | R/W | Repeat start,读该位时总得到0, 写: 0:不发送repeat start信号; 1:发送repeat start信号 |
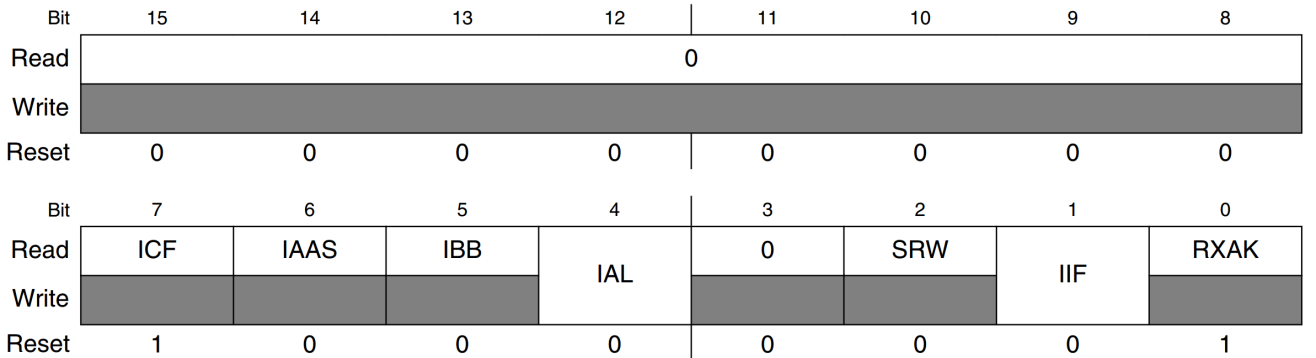
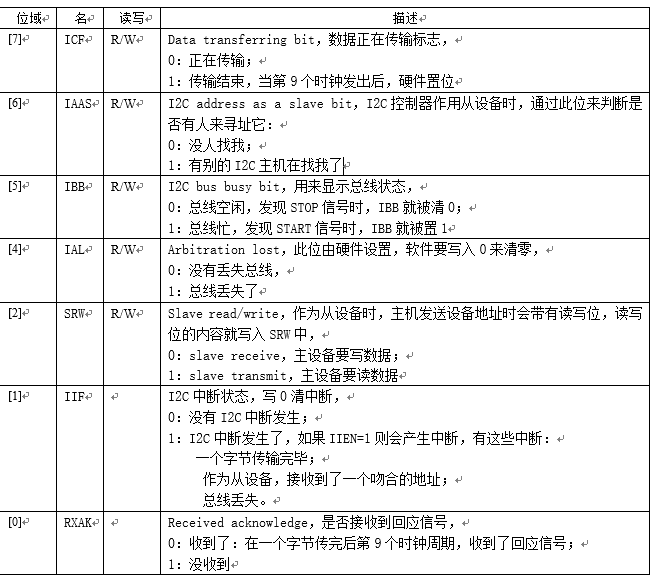
状态寄存器I2Cx_I2SR
数据寄存器最后一个寄存器就是 I2Cx_I2DR
I2C的数据寄存器,此寄存器只有低 8位有效,当要发送数据的时候将要发送的数据写入到此寄存器,如果要接收数据的话直接读取此寄存器即可得到接收到的数据。
I2C代码分析
bsp_i2c.c 参见代码【i2c_ap3216c】工程。
#include "bsp_i2c.h"
#include "bsp_delay.h"
#include "stdio.h"
/*
* @description : 初始化I2C,波特率100KHZ
* @param - base : 要初始化的IIC设置
* @return : 无
*/
void i2c_init(I2C_Type *base)
{
/* 1、配置I2C */
base->I2CR &= ~(1 << 7); /* 要访问I2C的寄存器,首先需要先关闭I2C */
/* 设置波特率为100K
* I2C的时钟源来源于 PERCLK_ROOT=66Mhz
* IC2 时钟 = PERCLK_ROOT/dividison(IFDR寄存器)
* 设置寄存器IFDR,IFDR寄存器参考IMX6UL参考手册P1260页,表29-3,
* 根据表29-3里面的值,挑选出一个还是的分频数,比如本例程我们
* 设置I2C的波特率为100K, 因此当分频值=66000000/100000=660.
* 在表29-3里面查找,没有660这个值,但是有640,因此就用640,
* 即寄存器IFDR的IC位设置为0X15
*/
base->IFDR = 0X15 << 0;
/*
* 设置寄存器I2CR,开启I2C
* bit[7] : 1 使能I2C,I2CR寄存器其他位其作用之前,此位必须最先置1
*/
base->I2CR |= (1<<7);
}
/*
* @description : 发送重新开始信号
* @param - base : 要使用的IIC
* @param - addrss : 设备地址
* @param - direction : 方向
* @return : 0 正常 其他值 出错
*/
unsigned char i2c_master_repeated_start(I2C_Type *base, unsigned char address, enum i2c_direction direction)
{
/* I2C忙并且工作在从模式,跳出 */
if(base->I2SR & (1 << 5) && (((base->I2CR) & (1 << 5)) == 0))
return 1;
/*
* 设置寄存器I2CR
* bit[4]: 1 发送
* bit[2]: 1 产生重新开始信号
*/
base->I2CR |= (1 << 4) | (1 << 2);
/*
* 设置寄存器I2DR
* bit[7:0] : 要发送的数据,这里写入从设备地址
* 参考资料:IMX6UL参考手册P1249
*/
base->I2DR = ((unsigned int)address << 1) | ((direction == kI2C_Read)? 1 : 0);
return 0;
}
/*
* @description : 发送开始信号
* @param - base : 要使用的IIC
* @param - addrss : 设备地址
* @param - direction : 方向
* @return : 0 正常 其他值 出错
*/
unsigned char i2c_master_start(I2C_Type *base, unsigned char address, enum i2c_direction direction)
{
if(base->I2SR & (1 << 5)) /* I2C忙 */
return 1;
/*
* 设置寄存器I2CR
* bit[5]: 1 主模式
* bit[4]: 1 发送
*/
base->I2CR |= (1 << 5) | (1 << 4);
/*
* 设置寄存器I2DR
* bit[7:0] : 要发送的数据,这里写入从设备地址
* 参考资料:IMX6UL参考手册P1249
*/
base->I2DR = ((unsigned int)address << 1) | ((direction == kI2C_Read)? 1 : 0);
return 0;
}
/*
* @description : 检查并清除错误
* @param - base : 要使用的IIC
* @param - status : 状态
* @return : 状态结果
*/
unsigned char i2c_check_and_clear_error(I2C_Type *base, unsigned int status)
{
/* 检查是否发生仲裁丢失错误 */
if(status & (1<<4))
{
base->I2SR &= ~(1<<4); /* 清除仲裁丢失错误位 */
base->I2CR &= ~(1 << 7); /* 先关闭I2C */
base->I2CR |= (1 << 7); /* 重新打开I2C */
return I2C_STATUS_ARBITRATIONLOST;
}
else if(status & (1 << 0)) /* 没有接收到从机的应答信号 */
{
return I2C_STATUS_NAK; /* 返回NAK(No acknowledge) */
}
return I2C_STATUS_OK;
}
/*
* @description : 停止信号
* @param - base : 要使用的IIC
* @param : 无
* @return : 状态结果
*/
unsigned char i2c_master_stop(I2C_Type *base)
{
unsigned short timeout = 0xffff;
/*
* 清除I2CR的bit[5:3]这三位
*/
base->I2CR &= ~((1 << 5) | (1 << 4) | (1 << 3));
/* 等待忙结束 */
while((base->I2SR & (1 << 5)))
{
timeout--;
if(timeout == 0) /* 超时跳出 */
return I2C_STATUS_TIMEOUT;
}
return I2C_STATUS_OK;
}
/*
* @description : 发送数据
* @param - base : 要使用的IIC
* @param - buf : 要发送的数据
* @param - size : 要发送的数据大小
* @param - flags : 标志
* @return : 无
*/
void i2c_master_write(I2C_Type *base, const unsigned char *buf, unsigned int size)
{
/* 等待传输完成 */
while(!(base->I2SR & (1 << 7)));
base->I2SR &= ~(1 << 1); /* 清除标志位 */
base->I2CR |= 1 << 4; /* 发送数据 */
while(size--)
{
base->I2DR = *buf++; /* 将buf中的数据写入到I2DR寄存器 */
while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */
base->I2SR &= ~(1 << 1); /* 清除标志位 */
/* 检查ACK */
if(i2c_check_and_clear_error(base, base->I2SR))
break;
}
base->I2SR &= ~(1 << 1);
i2c_master_stop(base); /* 发送停止信号 */
}
/*
* @description : 读取数据
* @param - base : 要使用的IIC
* @param - buf : 读取到数据
* @param - size : 要读取的数据大小
* @return : 无
*/
void i2c_master_read(I2C_Type *base, unsigned char *buf, unsigned int size)
{
volatile uint8_t dummy = 0;
dummy++; /* 防止编译报错 */
/* 等待传输完成 */
while(!(base->I2SR & (1 << 7)));
base->I2SR &= ~(1 << 1); /* 清除中断挂起位 */
base->I2CR &= ~((1 << 4) | (1 << 3)); /* 接收数据 */
/* 如果只接收一个字节数据的话发送NACK信号 */
if(size == 1)
base->I2CR |= (1 << 3);
dummy = base->I2DR; /* 假读 */
while(size--)
{
while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */
base->I2SR &= ~(1 << 1); /* 清除标志位 */
if(size == 0)
{
i2c_master_stop(base); /* 发送停止信号 */
}
if(size == 1)
{
base->I2CR |= (1 << 3);
}
*buf++ = base->I2DR;
}
}
/*
* @description : I2C数据传输,包括读和写
* @param - base: 要使用的IIC
* @param - xfer: 传输结构体
* @return : 传输结果,0 成功,其他值 失败;
*/
unsigned char i2c_master_transfer(I2C_Type *base, struct i2c_transfer *xfer)
{
unsigned char ret = 0;
enum i2c_direction direction = xfer->direction;
base->I2SR &= ~((1 << 1) | (1 << 4)); /* 清除标志位 */
/* 等待传输完成 */
while(!((base->I2SR >> 7) & 0X1)){};
/* 如果是读的话,要先发送寄存器地址,所以要先将方向改为写 */
if ((xfer->subaddressSize > 0) && (xfer->direction == kI2C_Read))
{
direction = kI2C_Write;
}
ret = i2c_master_start(base, xfer->slaveAddress, direction); /* 发送开始信号 */
if(ret)
{
return ret;
}
while(!(base->I2SR & (1 << 1))){}; /* 等待传输完成 */
ret = i2c_check_and_clear_error(base, base->I2SR); /* 检查是否出现传输错误 */
if(ret)
{
i2c_master_stop(base); /* 发送出错,发送停止信号 */
return ret;
}
/* 发送寄存器地址 */
if(xfer->subaddressSize)
{
do
{
base->I2SR &= ~(1 << 1); /* 清除标志位 */
xfer->subaddressSize--; /* 地址长度减一 */
base->I2DR = ((xfer->subaddress) >> (8 * xfer->subaddressSize)); //向I2DR寄存器写入子地址
while(!(base->I2SR & (1 << 1))); /* 等待传输完成 */
/* 检查是否有错误发生 */
ret = i2c_check_and_clear_error(base, base->I2SR);
if(ret)
{
i2c_master_stop(base); /* 发送停止信号 */
return ret;
}
} while ((xfer->subaddressSize > 0) && (ret == I2C_STATUS_OK));
if(xfer->direction == kI2C_Read) /* 读取数据 */
{
base->I2SR &= ~(1 << 1); /* 清除中断挂起位 */
i2c_master_repeated_start(base, xfer->slaveAddress, kI2C_Read); /* 发送重复开始信号和从机地址 */
while(!(base->I2SR & (1 << 1))){};/* 等待传输完成 */
/* 检查是否有错误发生 */
ret = i2c_check_and_clear_error(base, base->I2SR);
if(ret)
{
ret = I2C_STATUS_ADDRNAK;
i2c_master_stop(base); /* 发送停止信号 */
return ret;
}
}
}
/* 发送数据 */
if ((xfer->direction == kI2C_Write) && (xfer->dataSize > 0))
{
i2c_master_write(base, xfer->data, xfer->dataSize);
}
/* 读取数据 */
if ((xfer->direction == kI2C_Read) && (xfer->dataSize > 0))
{
i2c_master_read(base, xfer->data, xfer->dataSize);
}
return 0;
}
I2C丛机器件
ap3216c
简介
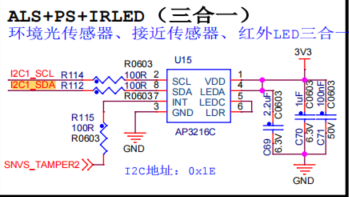
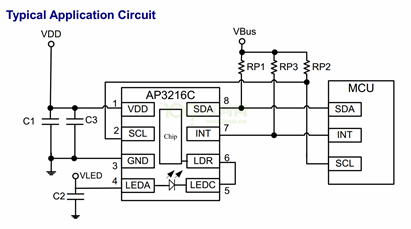
开发板上通过 I2C1连接了一个三合一环境传感器: AP3216C,AP3216C是由敦南 科技 推出的一款传感器,其支持环境光强度 (ALS)、接 近距离 (PS)和红外线强度 (IR)这三个环境参数检测。该芯片可以通过 IIC接口与主控制相连,并且支持中断。AP3216C常被用于手机、平板、导航设备等,其内置的接近传感器可以用于检测是否有物体接近,比如手机上用来检测耳朵是否接触听筒,如果检测到的话就表示正在打电话,手机就会关闭手机屏幕以省电。也可以使用环境光传感器检测光照强度,可以实现自动背光亮度调节。
AP3216的设备地址为 0X1E,同几乎所有的 I2C从器件一样, AP3216C内部也有一些寄存器,通过这些寄存器我们可以配置 AP3216C的工作模式,并且读取相应的数 据。典型电路设计如下:
寄存器介绍
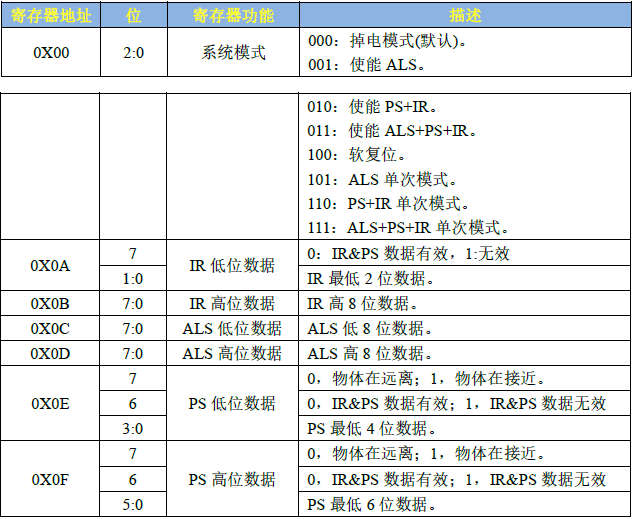
0X00这个寄存器是模式控制寄存器,用来设置 AP3216C的工作模式,一般开始先将其设置为 0X04,也就是先软件复位一次 AP3216C。接下来根据实际使用情况选择合适的工作模式,比如设置为 0X03,也就是开启 ALS+PS+IR。从 0X0A~0X0F这 6个寄存器就是数据寄存器,保存着 ALS、 PS和 IR这三个传感器获取到的数据值。如果同时打开 ALS、PS和 IR则 读取间隔最少要 112.5ms,因为 AP3216C完成一次转换需要 112.5ms。关于AP3216C的介绍就到这里,如果要想详细的研究此芯片的话,请大家自行查阅其 数据手册。本章实验中我们通过 I.MX6U的 I2C1来读取 AP3216C内部的 ALS、 PS和 IR这三个传感器的值,并且在 LCD上显示。开机会先检测 AP3216C是否存在,一般的芯片是有个 ID寄存器,通过读取 ID寄存器判断 ID是否正确就可以检测芯片是否存在。但是 AP3216C没有 ID寄存器,所以我们就通过向寄存器 0X00写入一个值,然后再读取 0X00寄存器,判断读出得到值和写入的是否相等,如果相等就表示 AP3216C存在,否则的话 AP3216C就不存在。
参见代码【i2c_ap3216c】工程。
/***************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名 : bsp_ap3216c.c
作者 : 左忠凯
版本 : V1.0
描述 : AP3216C驱动文件。
其他 : 无
论坛 : www.wtmembed.com
日志 : 初版V1.0 2019/3/26 左忠凯创建
***************************************************************/
#include "bsp_ap3216c.h"
#include "bsp_i2c.h"
#include "bsp_delay.h"
#include "cc.h"
#include "stdio.h"
/*
* @description : 初始化AP3216C
* @param : 无
* @return : 0 成功,其他值 错误代码
*/
unsigned char ap3216c_init(void)
{
unsigned char data = 0;
/* 1、IO初始化,配置I2C IO属性
* I2C1_SCL -> UART4_TXD
* I2C1_SDA -> UART4_RXD
*/
IOMUXC_SetPinMux(IOMUXC_UART4_TX_DATA_I2C1_SCL, 1);
IOMUXC_SetPinMux(IOMUXC_UART4_RX_DATA_I2C1_SDA, 1);
/*
*bit 16:0 HYS关闭
*bit [15:14]: 1 默认47K上拉
*bit [13]: 1 pull功能
*bit [12]: 1 pull/keeper使能
*bit [11]: 0 关闭开路输出
*bit [7:6]: 10 速度100Mhz
*bit [5:3]: 110 驱动能力为R0/6
*bit [0]: 1 高转换率
*/
IOMUXC_SetPinConfig(IOMUXC_UART4_TX_DATA_I2C1_SCL, 0x70B0);
IOMUXC_SetPinConfig(IOMUXC_UART4_RX_DATA_I2C1_SDA, 0X70B0);
i2c_init(I2C1); /* 初始化I2C1 */
/* 2、初始化AP3216C */
ap3216c_writeonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X04); /* 复位AP3216C */
delay_ms(50); /* AP33216C复位至少10ms */
ap3216c_writeonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X03); /* 开启ALS、PS+IR */
data = ap3216c_readonebyte(AP3216C_ADDR, AP3216C_SYSTEMCONG); /* 读取刚刚写进去的0X03 */
if(data == 0X03)
return 0; /* AP3216C正常 */
else
return 1; /* AP3216C失败 */
}
/*
* @description : 向AP3216C写入数据
* @param - addr: 设备地址
* @param - reg : 要写入的寄存器
* @param - data: 要写入的数据
* @return : 操作结果
*/
unsigned char ap3216c_writeonebyte(unsigned char addr,unsigned char reg, unsigned char data)
{
unsigned char status=0;
unsigned char writedata=data;
struct i2c_transfer masterXfer;
/* 配置I2C xfer结构体 */
masterXfer.slaveAddress = addr; /* 设备地址 */
masterXfer.direction = kI2C_Write; /* 写入数据 */
masterXfer.subaddress = reg; /* 要写入的寄存器地址 */
masterXfer.subaddressSize = 1; /* 地址长度一个字节 */
masterXfer.data = &writedata; /* 要写入的数据 */
masterXfer.dataSize = 1; /* 写入数据长度1个字节 */
if(i2c_master_transfer(I2C1, &masterXfer))
status=1;
return status;
}
/*
* @description : 从AP3216C读取一个字节的数据
* @param - addr: 设备地址
* @param - reg : 要读取的寄存器
* @return : 读取到的数据。
*/
unsigned char ap3216c_readonebyte(unsigned char addr,unsigned char reg)
{
unsigned char val=0;
struct i2c_transfer masterXfer;
masterXfer.slaveAddress = addr; /* 设备地址 */
masterXfer.direction = kI2C_Read; /* 读取数据 */
masterXfer.subaddress = reg; /* 要读取的寄存器地址 */
masterXfer.subaddressSize = 1; /* 地址长度一个字节 */
masterXfer.data = &val; /* 接收数据缓冲区 */
masterXfer.dataSize = 1; /* 读取数据长度1个字节 */
i2c_master_transfer(I2C1, &masterXfer);
return val;
}
/*
* @description : 读取AP3216C的数据,读取原始数据,包括ALS,PS和IR, 注意!
* : 如果同时打开ALS,IR+PS的话两次数据读取的时间间隔要大于112.5ms
* @param - ir : ir数据
* @param - ps : ps数据
* @param - ps : als数据
* @return : 无。
*/
void ap3216c_readdata(unsigned short *ir, unsigned short *ps, unsigned short *als)
{
unsigned char buf[6];
unsigned char i;
/* 循环读取所有传感器数据 */
for(i = 0; i < 6; i++)
{
buf[i] = ap3216c_readonebyte(AP3216C_ADDR, AP3216C_IRDATALOW + i);
}
if(buf[0] & 0X80) /* IR_OF位为1,则数据无效 */
*ir = 0;
else /* 读取IR传感器的数据 */
*ir = ((unsigned short)buf[1] << 2) | (buf[0] & 0X03);
*als = ((unsigned short)buf[3] << 8) | buf[2]; /* 读取ALS传感器的数据 */
if(buf[4] & 0x40) /* IR_OF位为1,则数据无效 */
*ps = 0;
else /* 读取PS传感器的数据 */
*ps = ((unsigned short)(buf[5] & 0X3F) << 4) | (buf[4] & 0X0F);
}
main.c
while(ap3216c_init()) /* 检测不到AP3216C */
{
printf("AP3216C Check Failed!\r\n");
delay_ms(1000);
}
while(1)
{
ap3216c_readdata(&ir, &ps, &als); /* 读取数据 */
printf("ir=%d ps=%d als=%d \r\n",ir,ps,als);
delay_ms(1000);
LED_RGB_RED_TOG();
}
mpu6050
参见代码【i2c_mpu6050】工程。
/***************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名 : bsp_mpu.c
作者 : 左忠凯
版本 : V1.0
描述 : MPU6050驱动文件。
其他 : 无
论坛 : www.wtmembed.com
日志 : 初版V1.0 2019/1/15 左忠凯创建
***************************************************************/
#include "bsp_mpu.h"
#include "bsp_i2c.h"
#include "bsp_delay.h"
#include "stdio.h"
/*
* @description : 初始化MPU6050
* @param : 无
* @return : 0 成功,其他值 错误代码
*/
unsigned char mpu_init(void)
{
unsigned char data = 0;
/* 1、IO初始化
* I2C1_SCL -> UART4_TXD
* I2C1_SDA -> UART4_RXD
*/
IOMUXC_SetPinMux(IOMUXC_UART4_TX_DATA_I2C1_SCL, 1);
IOMUXC_SetPinMux(IOMUXC_UART4_RX_DATA_I2C1_SDA, 1);
/* 2、配置I2C IO属性
*bit 16:0 HYS关闭
*bit [15:14]: 1 默认47K上拉
*bit [13]: 1 pull功能
*bit [12]: 1 pull/keeper使能
*bit [11]: 0 关闭开路输出
*bit [7:6]: 10 速度100Mhz
*bit [5:3]: 110 驱动能力为R0/6
*bit [0]: 1 高转换率
*/
IOMUXC_SetPinConfig(IOMUXC_UART4_TX_DATA_I2C1_SCL, 0x70B0);
IOMUXC_SetPinConfig(IOMUXC_UART4_RX_DATA_I2C1_SDA, 0X70B0);
i2c_init(I2C1); /* 初始化I2C1 */
mpu_write_byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X80);//复位MPU6050
delay_ms(100); //延时100ms
mpu_write_byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X00);//唤醒MPU6050
mpu_set_gyro_range(3); //陀螺仪传感器,±2000dps
mpu_set_accel_range(0); //加速度传感器,±2g
mpu_set_rate(50); //设置采样率50Hz
mpu_write_byte(MPU6050_ADDR,MPU_INT_EN_REG,0X00); //关闭所有中断
mpu_write_byte(MPU6050_ADDR,MPU_USER_CTRL_REG,0X00);//I2C主模式关闭
mpu_write_byte(MPU6050_ADDR,MPU_FIFO_EN_REG,0X00); //关闭FIFO
mpu_write_byte(MPU6050_ADDR,MPU_INTBP_CFG_REG,0X82);//INT引脚低电平有效,开启bypass模式,可以直接读取磁力计
data = mpu_read_byte(MPU6050_ADDR,MPU_DEVICE_ID_REG);
if(data == MPU6050_ID)
{
printf("MPU6050 ID=%#X\r\n", data);
mpu_write_byte(MPU6050_ADDR, MPU_PWR_MGMT1_REG, 0X01); /* 设置CLKSEL,PLL X轴为参考 */
mpu_write_byte(MPU6050_ADDR, MPU_PWR_MGMT2_REG, 0X00); /* 加速度与陀螺仪都工作 */
mpu_set_rate(50); /* 设置采样率为50Hz */
}
else {
return 1;
}
// data = mpu_read_byte(AK8963_ADDR, MAG_WIA); /* 读取AK8963 ID */
// if(data == AK8963_ID)
// {
// printf("AK8963_ID=%#X\r\n", data);
// mpu_write_byte(AK8963_ADDR, MAG_CNTL1, 0X11); /* 设置AK8963为单次测量模式 */
// }else return 2;
return 0;
}
/*
* @description : 向MPU6050写入数据
* @param - addr: 设备地址
* @param - reg : 要写入的寄存器
* @param - data: 要写入的数据
* @return : 操作结果
*/
unsigned char mpu_write_byte(unsigned char addr,unsigned char reg, unsigned char data)
{
unsigned char status=0;
unsigned char writedata=data;
struct i2c_transfer masterXfer;
/* 配置I2C xfer结构体 */
masterXfer.slaveAddress = addr; /* 设备地址 */
masterXfer.direction = kI2C_Write; /* 写入数据 */
masterXfer.subaddress = reg; /* 要写入的寄存器地址 */
masterXfer.subaddressSize = 1; /* 地址长度一个字节 */
masterXfer.data = &writedata; /* 要写入的数据 */
masterXfer.dataSize = 1; /* 写入数据长度1个字节 */
if(i2c_master_transfer(I2C1, &masterXfer))
status=1;
return status;
}
/*
* @description : 从MPU6050读取一个字节的数据
* @param - addr: 设备地址
* @param - reg : 要读取的寄存器
* @return : 读取到的数据。
*/
unsigned char mpu_read_byte(unsigned char addr,unsigned char reg)
{
unsigned char val=0;
struct i2c_transfer masterXfer;
masterXfer.slaveAddress = addr; /* 设备地址 */
masterXfer.direction = kI2C_Read; /* 读取数据 */
masterXfer.subaddress = reg; /* 要读取的寄存器地址 */
masterXfer.subaddressSize = 1; /* 地址长度一个字节 */
masterXfer.data = &val; /* 接收数据缓冲区 */
masterXfer.dataSize = 1; /* 读取数据长度1个字节 */
i2c_master_transfer(I2C1, &masterXfer);
return val;
}
/*
* @description : 从MPU6050读取多个字节的数据
* @param - addr: 设备地址
* @param - reg : 要读取的开始寄存器地址
* @param - len : 要读取的数据长度.
* @param - buf : 读取到的数据缓冲区
* @return : 无
*/
void mpu_read_len(unsigned char addr,unsigned char reg,unsigned char len,unsigned char *buf)
{
struct i2c_transfer masterXfer;
masterXfer.slaveAddress = addr; /* 设备地址 */
masterXfer.direction = kI2C_Read; /* 读取数据 */
masterXfer.subaddress = reg; /* 要读取的寄存器地址 */
masterXfer.subaddressSize = 1; /* 地址长度一个字节 */
masterXfer.data = buf; /* 接收数据缓冲区 */
masterXfer.dataSize = len; /* 读取数据长度1个字节 */
i2c_master_transfer(I2C1, &masterXfer);
}
/*
* @description : 设置MPU6050陀螺仪量程
* @param - range : 量程范围,0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
* @return : 操作结果 0,设置成功 其他,设置失败
*/
unsigned char mpu_set_gyro_range(unsigned char range)
{
return mpu_write_byte(MPU6050_ADDR, MPU_GYRO_CFG_REG, range << 3);//设置陀螺仪满量程范围
}
/*
* @description : 设置MPU6050加速度量程
* @param - range : 量程范围,0,±2g;1,±4g;2,±8g;3,±16g
* @return : 操作结果 0,设置成功 其他,设置失败
*/
unsigned char mpu_set_accel_range(unsigned char range)
{
return mpu_write_byte(MPU6050_ADDR, MPU_ACCEL_CFG_REG,range << 3);//设置加速度传感器满量程范围
}
/*
* @description : 设置MPU6050的数字低通滤波器
* @param - range : 数字低通滤波频率(Hz)
* @return : 操作结果 0,设置成功 其他,设置失败
*/
unsigned char mpu_set_lpf(unsigned short fre)
{
unsigned char data = 0;
if(fre >= 188) data=1;
else if(fre >= 98) data=2;
else if(fre >= 42) data=3;
else if(fre >= 20) data=4;
else if(fre >= 10) data=5;
else data = 6;
return mpu_write_byte(MPU6050_ADDR,MPU_CFG_REG,data);
}
/*
* @description : 设置MPU6050采样率(假定Fs=1KHz)
* @param - rate: 4~1000(Hz)
* @return : 操作结果 0,设置成功 其他,设置失败
*/
unsigned char mpu_set_rate(unsigned short rate)
{
unsigned char data;
if(rate > 1000) rate = 1000;
if(rate < 4) rate = 4;
data = 1000 / rate - 1;
data = mpu_write_byte(MPU6050_ADDR,MPU_SAMPLE_RATE_REG,data); /* 设置数字低通滤波器 */
return mpu_set_lpf(rate / 2); /* 自动设置LPF为采样率的一半 */
}
/*
* @description : 得到陀螺仪值(原始值)
* @param - gx : 陀螺仪X轴原始数据
* @param - gy : 陀螺仪Y轴原始数据
* @param - gz :陀螺仪Z轴原始数据
* @return : 0,设置成功 其他,设置失败
*/
void mpu_get_gyroscope(short *gx,short *gy,short *gz)
{
unsigned char buf[6];
mpu_read_len(MPU6050_ADDR, MPU_GYRO_XOUTH_REG, 6, buf);
*gx=((short)buf[0] << 8) | buf[1];
*gy=((short)buf[2] << 8) | buf[3];
*gz=((short)buf[4] << 8) | buf[5];
}
/*
* @description : 得到加速度原始值
* @param - ax : 加速度X轴原始数据
* @param - ay : 加速度Y轴原始数据
* @param - az :加速度Z轴原始数据
* @return : 0,设置成功 其他,设置失败
*/
void mpu_get_accelerometer(short *ax,short *ay,short *az)
{
unsigned char buf[6];
mpu_read_len(MPU6050_ADDR, MPU_ACCEL_XOUTH_REG, 6, buf);
*ax=((short)buf[0] << 8) | buf[1];
*ay=((short)buf[2] << 8) | buf[3];
*az=((short)buf[4] << 8) | buf[5];
}
/*
* @description : 得到原始磁力计值
* @param - mx : 磁力计X轴原始数据
* @param - my : 磁力计Y轴原始数据
* @param - mz :磁力计Z轴原始数据
* @return : 0,设置成功 其他,设置失败
*/
void mpu_get_magnetometer(short *mx, short *my, short *mz)
{
unsigned char buf[6];
mpu_read_len(AK8963_ADDR, MAG_XOUT_L , 6, buf);
*mx = ((short)buf[1] << 8) | buf[0];
*my = ((short)buf[3] << 8) | buf[2];
*mz = ((short)buf[5] << 8) | buf[4];
mpu_write_byte(AK8963_ADDR, MAG_CNTL1, 0X11); /* AK8963每次读完以后都需要重新设置为单次测量模式 */
}
main.c
printf("i2c demo c=%d\r\n",c);
while(ret =mpu_init()) /* 检测不到 */
{
printf("mpu6050 Check Failed =%d\r\n" ,ret);
delay_ms(1000);
}
printf("gyro.x gyro.y gyro.z acc.x acc.y acc.z\r\n");
while(1)
{
mpu_get_gyroscope(&gyro.x,&gyro.y,&gyro.z); /* 读取数据 */
mpu_get_accelerometer(&acc.x,&acc.y,&acc.z); /* 读取数据 */
printf( "%d %d %d %d %d %d\r\n",gyro.x,gyro.y,gyro.z,acc.x,acc.y,acc.z);
delay_ms(500);
LED_RGB_RED_TOG();
}
触摸IC
待写