内核态同步与互斥
原子操作的实现原理与使用
原子操作就是这个操作不会被打断。Linux有2种原子操作:原子变量、原子位。
原子变量内核操作函数
原子变量的操作函数在Linux内核文件arch\arm\include\asm\atomic.h中。
原子变量类型如下,实际上就是一个结构体(内核文件include/linux/types.h):
操作函数:下表中v都是atomic_t指针
| 函数名 | 作用 |
|---|---|
| atomic_read(v) | 读出原子变量的值,即v->counter |
| atomic_set(v,i) | 设置原子变量的值,即v->counter = i |
| atomic_inc(v) | v->counter++ |
| atomic_dec(v) | v->counter-- |
| atomic_add(i,v) | v->counter += i |
| atomic_sub(i,v) | v->counter -= i |
| atomic_inc_and_test(v) | 先加1,再判断新值是否等于0;等于0的话,返回值为1 |
| atomic_dec_and_test(v) | 先减1,再判断新值是否等于0;等于0的话,返回值为1 |
原子变量内核实现
注意:SMP就是Symmetric Multi-Processors,对称多处理器;UP即Uni-Processor,系统只有一个单核CPU。
这些函数都是在Linux内核文件arch\arm\include\asm\atomic.h中。
atomic_read,atomic_set这些操作都只需要一条汇编指令,所以它们本身就是不可打断的。
问题在于atomic_inc这类操作,要读出、修改、写回。
以atomic_inc为例,在atomic.h文件中,如下定义:
#define atomic_inc(v) atomic_add(1, v)
atomic_add又是怎样实现的呢?用下面这个宏:
ATOMIC_OPS(add, +=, add)
把这个宏展开:
#define ATOMIC_OPS(op, c_op, asm_op) \
ATOMIC_OP(op, c_op, asm_op) \
ATOMIC_OP_RETURN(op, c_op, asm_op) \
ATOMIC_FETCH_OP(op, c_op, asm_op)
从上面的宏可以知道,一个ATOMIC_OPS定义了3个函数。比如ATOMIC_OPS(add, +=, add)就定义了这3个函数:
atomic_add
atomic_add_return
atomic_atomic_fetch_add 或 atomic_fetch_add_relaxed
我们以ATOMIC_OP(add, +=, add)为例,看它是如何实现atomic_add函数的,对于UP系统、SMP系统,分别有不同的实现方法。
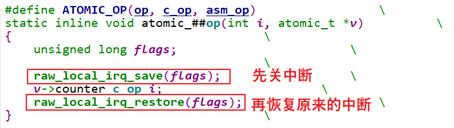
ATOMIC_OP在UP系统中的实现
对于ARMv6以下的CPU系统,不支持SMP。原子变量的操作简单粗暴:关中断,中断都关了,谁能来打断我?代码如下(arch\arm\include\asm\atomic.h):
ATOMIC_OP在SMP系统中的实现
对于ARMv6及以上的CPU,有一些特殊的汇编指令来实现原子操作,不再需要关中断,代码如下(arch\arm\include\asm\atomic.h):
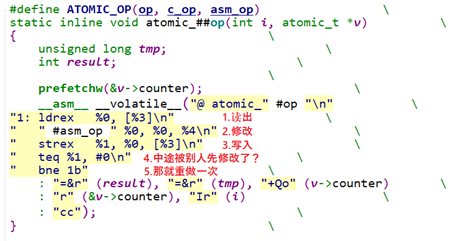
ldrex、strex 指令解析
在ARMv6及以上的架构中,有ldrex、strex指令,ex表示exclude,意为独占地。这2条指令要配合使用,举例如下:
ldrex r0, [r1] # 步骤1:读取r1地址值到r0寄存器,并标记r1所指的内存地址为独占模式
add r0,1 # 步骤2:修改r0的值
strex r2, r0, [r1] # 步骤3:分两种情况
# 如果r1独占访问标记还在,则把r0的新值写入r1所指内存,并且清除独占访问的标记,把r2设为0表示成功
# 如果r1的独占访问标记不存在了,就不会更新内存,并且把r2设为1表示失败
假设这样的抢占场景:
程序A在读出、修改某个变量时(比如程序A处于步骤2),被程序B抢占了;
程序B先完成了操作,程序B的
strex操作会清除独占访问的标记;轮到程序A执行剩下的写入操作时(步骤3),它发现独占访问标记不存在了,于是取消写入操作。这就避免了这样的事情发生:程序A、B同时修改这个变量,并且都自认为成功了。
举报个例子,比如前面的atomic_add函数,假设一开始变量值为0,程序A本想把值从0变为1;但是中途被程序B先把值从0变成1了;但是没关系,程序A里会再次读出新值1、再修改、写入,最终这个值被程序A从1改为2。从整个过程看出程序A虽然被程序B打断了,但是A在被打断后,是重新读出新值再进行下面的操作,这个过程是没有被打断。对于程序B,整个add过程也是连续进行,所以,从这个角度来看,整个过程是连续的,也符合原子的定义:一个完整的读、修改、写入原子的,不会被别的程序打断。
在ARMv6及以上的架构中,原子操作不再需要关闭中断,关中断的花销太大了。并且关中断并不适合SMP多CPU系统,你关了CPU0的中断,CPU1也可能会来执行些操作啊。
在ARMv6及以上的架构中,原子操作的执行过程是可以被打断的,但是它的效果符合原子的定义:一个完整的读、修改、写入原子的,不会被别的程序打断。它的思路很简单:如果被别的程序打断了,那就重来,最后总会成功的。
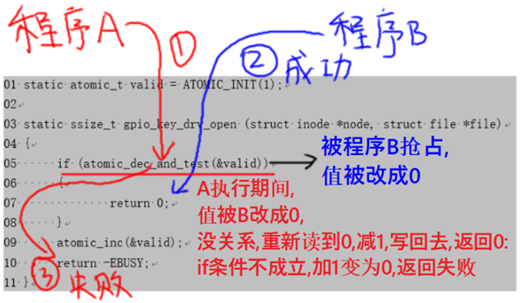
原子变量使用案例
static atomic_t valid = ATOMIC_INIT(1);
static ssize_t gpio_key_drv_open (struct inode *node, struct file *file)
{
if (atomic_dec_and_test(&valid))
{
return 0;
}
atomic_inc(&valid);
return -EBUSY;
}
static int gpio_key_drv_close (struct inode *node, struct file *file)
{
atomic_inc(&valid);
return 0;
}
第5行的atomic_dec_and_test,这是一个原子操作,在ARMv6以下的CPU架构中,这个函数是在关中断的情况下执行的,它确实是原子的,执行过程不被打断。
但是在ARMv6及以上的CPU架构中,这个函数其实是可以被打断的,但是它实现了原子操作的效果,如下图所示:
原子位操作
原子位的内核操作函数
原子位的操作函数在Linux内核文件arch\arm\include\asm\bitops.h中,下表中p是一个unsigned long指针。
| 函数名 | 作用 |
|---|---|
| set_bit(nr,p) | 设置(*p)的bit nr为1 |
| clear_bit(nr,p) | 清除(*p)的bit nr为0 |
| change_bit(nr,p) | 改变(*p)的bit nr,从1变为0,或是从0变为1 |
| test_and_set_bit(nr,p) | 设置(*p)的bit nr为1,返回该位的老值 |
| test_and_clear_bit(nr,p) | 清除(*p)的bit nr为0,返回该位的老值 |
| test_and_change_bit(nr,p) | 改变(*p)的bit nr,从1变为0,或是从0变为1;返回该位的老值 |
原子位的内核实现
在ARMv6以下的架构里,不支持SMP系统,原子位的操作函数也是简单粗暴:关中断。以
set_bit函数为例,代码在内核文件arch\arm\include\asm\bitops.h中,如下: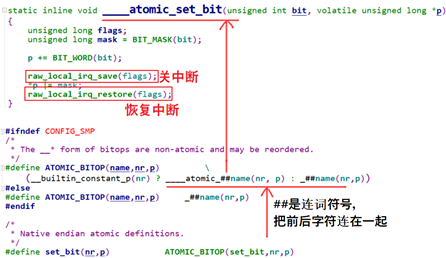
在ARMv6及以上的架构中,不需要关中断,有
ldrex、strex等指令,这些指令的作用在前面介绍过。还是以set_bit函数为例,代码如下: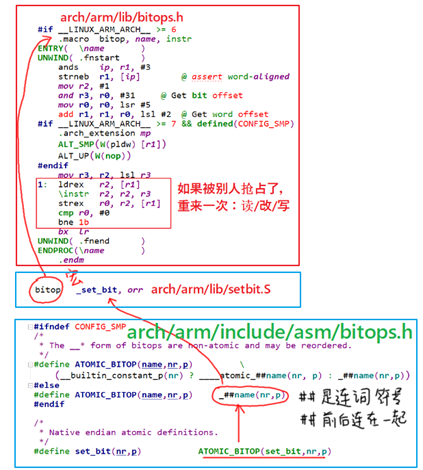
Linux锁的介绍与使用
Linux内核提供了很多类型的锁,它们可以分为两类:
自旋锁(spinning lock);
睡眠锁(sleeping lock)。
自旋锁
简单地说就是无法获得锁时,不会休眠,会一直循环等待。有这些自旋锁:
| 自旋锁 | 描述 |
|---|---|
| raw_spinlock_t | 原始自旋锁(后面讲解) |
| bit spinlocks | 位自旋锁(似乎没什么意义) |
自旋锁的加锁、解锁函数是:spin_lock、spin_unlock,还可以加上各种后缀,这表示在加锁或解锁的同时,还会做额外的事情:
| 后缀 | 描述 |
|---|---|
| _bh() | 加锁时禁止下半部(软中断),解锁时使能下半部(软中断) |
| _irq() | 加锁时禁止中断,解锁时使能中断 |
| _irqsave/restore() | 加锁时禁止并中断并记录状态,解锁时恢复中断为所记录的状态 |
睡眠锁
简单地说就是无法获得锁时,当前线程就会休眠。有这些休眠锁:
| 休眠锁 | 描述 |
|---|---|
| mutex | mutual exclusion,彼此排斥,即互斥锁(后面讲解) |
| rt_mutex | |
| semaphore | 信号量、旗语(后面讲解) |
| rw_semaphore | 读写信号量,读写互斥,但是可以多人同时读 |
| ww_mutex | |
| percpu_rw_semaphore | 对rw_semaphore的改进,性能更优 |
锁的内核函数
自旋锁
spinlock函数在内核文件include\linux\spinlock.h中声明,如下表:
| 函数名 | 作用 |
|---|---|
| spin_lock_init(_lock) | 初始化自旋锁为unlock状态 |
| void spin_lock(spinlock_t *lock) | 获取自旋锁(加锁),返回后肯定获得了锁 |
| int spin_trylock(spinlock_t *lock) | 尝试获得自旋锁,成功获得锁则返回1,否则返回0 |
| void spin_unlock(spinlock_t *lock) | 释放自旋锁,或称解锁 |
| int spin_is_locked(spinlock_t *lock) | 返回自旋锁的状态,已加锁返回1,否则返回0 |
自旋锁的加锁、解锁函数是:spin_lock、spin_unlock,还可以加上各种后缀,这表示在加锁或解锁的同时,还会做额外的事情:
| 后缀 | 描述 |
|---|---|
| _bh() | 加锁时禁止下半部(软中断),解锁时使能下半部(软中断) |
| _irq() | 加锁时禁止中断,解锁时使能中断 |
| _irqsave/restore() | 加锁时禁止并中断并记录状态,解锁时恢复中断为所记录的状态 |
信号量semaphore
semaphore函数在内核文件include\linux\semaphore.h中声明,如下表:
| 函数名 | 作用 |
|---|---|
| DEFINE_SEMAPHORE(name) | 定义一个struct semaphore name结构体, count值设置为1 |
| void sema_init(struct semaphore *sem, int val) | 初始化semaphore |
| void down(struct semaphore *sem) | 获得信号量,如果暂时无法获得就会休眠 返回之后就表示肯定获得了信号量 在休眠过程中无法被唤醒, 即使有信号发给这个进程也不处理 |
| int down_interruptible(struct semaphore *sem) | 获得信号量,如果暂时无法获得就会休眠, 休眠过程有可能收到信号而被唤醒, 要判断返回值: 0:获得了信号量 -EINTR:被信号打断 |
| int down_killable(struct semaphore *sem) | 跟down_interruptible类似, down_interruptible可以被任意信号唤醒, 但down_killable只能被“fatal signal”唤醒, 返回值: 0:获得了信号量 -EINTR:被信号打断 |
| int down_trylock(struct semaphore *sem) | 尝试获得信号量,不会休眠, 返回值: 0:获得了信号量 1:没能获得信号量 |
| int down_timeout(struct semaphore *sem, long jiffies) | 获得信号量,如果不成功,休眠一段时间 返回值: 0:获得了信号量 -ETIME:这段时间内没能获取信号量,超时返回 down_timeout休眠过程中,它不会被信号唤醒 |
| void up(struct semaphore *sem) | 释放信号量,唤醒其他等待信号量的进程 |
互斥量mutex
mutex函数在内核文件include\linux\mutex.h中声明,如下表:
| 函数名 | 作用 |
|---|---|
| mutex_init(mutex) | 初始化一个struct mutex指针 |
| DEFINE_MUTEX(mutexname) | 初始化struct mutex mutexname |
| int mutex_is_locked(struct mutex *lock) | 判断mutex的状态 1:被锁了(locked) 0:没有被锁 |
| void mutex_lock(struct mutex *lock) | 获得mutex,如果暂时无法获得,休眠 返回之时必定是已经获得了mutex |
| int mutex_lock_interruptible(struct mutex *lock) | 获得mutex,如果暂时无法获得,休眠; 休眠过程中可以被信号唤醒, 返回值: 0:成功获得了mutex -EINTR:被信号唤醒了 |
| int mutex_lock_killable(struct mutex *lock) | 跟mutex_lock_interruptible类似, mutex_lock_interruptible可以被任意信号唤醒, 但mutex_lock_killable只能被“fatal signal”唤醒, 返回值: 0:获得了mutex -EINTR:被信号打断 |
| int mutex_trylock(struct mutex *lock) | 尝试获取mutex,如果无法获得,不会休眠, 返回值: 1:获得了mutex, 0:没有获得 注意,这个返回值含义跟一般的mutex函数相反, |
| void mutex_unlock(struct mutex *lock) | 释放mutex,会唤醒其他等待同一个mutex的线程 |
| int atomic_dec_and_mutex_lock(atomic_t cnt, struct mutex lock) | 让原子变量的值减1, 如果减1后等于0,则获取mutex, 返回值: 1:原子变量等于0并且获得了mutex 0:原子变量减1后并不等于0,没有获得mutex |
semaphore和mutex的区别
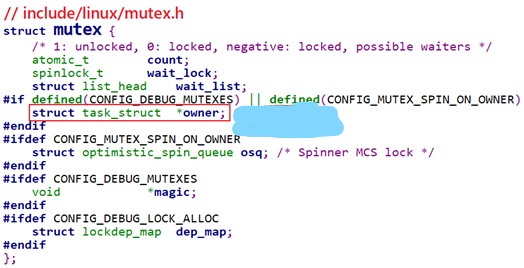
semaphore中可以指定count为任意值,而mutex的值只能设置为1或0。是不是把semaphore的值设置为1后,它就跟mutex一样了呢?不是的。看一下mutex的结构体定义,如下:
主要区别列表如下:
| semaphore | mutex | |
|---|---|---|
| 几把锁 | 任意,可设置 | 1 |
| 多次解锁 | 可以 | 不可以,因为只有1把锁 |
| 循环加锁 | 可以 | 不可以,因为只有1把锁 |
| 任务在持有锁的期间可否退出 | 可以 | 不建议,容易导致死锁 |
| 硬件中断、软件中断上下文中使用 | 可以 | 不可以 |
自旋锁spinlock的实现
自旋锁的内核结构体
spinlock对应的结构体如下定义,不同的架构可能有不同的实现
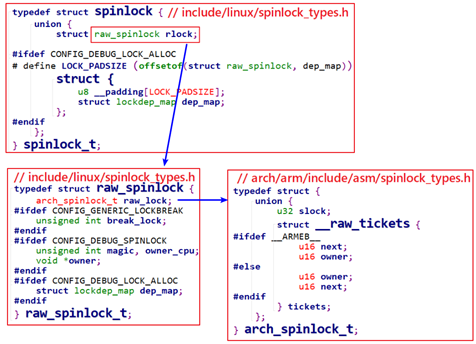
上述__raw_tickets结构体中有owner、next两个成员,这是在SMP系统中实现spinlock的关键。
spinlock在UP系统中实现
对于“自旋锁”,它的本意是:如果还没获得锁,我就原地打转等待。等待谁释放锁?
其他CPU;
其他进程/线程。
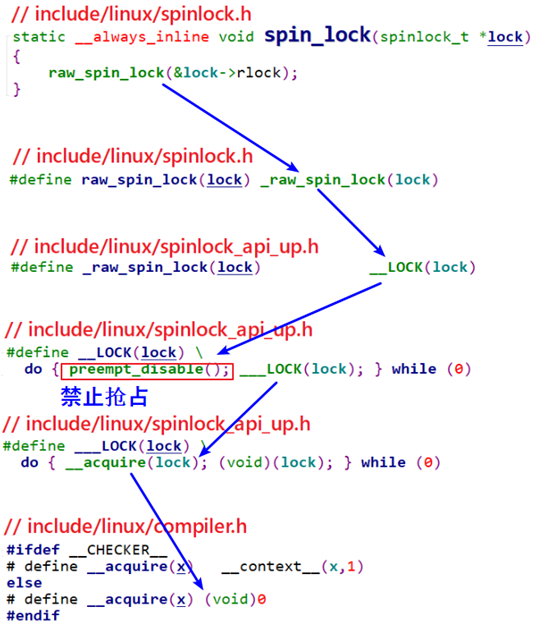
对于单CPU系统,没有“其他CPU”;如果内核不支持preempt,当前在内核态执行的线程也不可能被其他线程抢占,也就“没有其他进程/线程”。所以,对于不支持preempt的单CPU系统,spin_lock是空函数,不需要做其他事情。
如果单CPU系统的内核支持preempt,即当前线程正在执行内核态函数时,它是有可能被别的线程抢占的。这时spin_lock的实现就是调用“preempt_disable()”:你想抢我,我干脆禁止你运行。
在UP系统中,spin_lock函数定义如下:
对于spin_lock_irq(),在UP系统中就退化为local_irq_disable()和preempt_disable(),如下图所示:
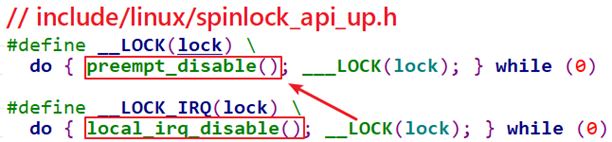
假设程序A要访问临界资源,可能会有中断也来访问临界资源,可能会有程序B也来访问临界资源,那么使用spin_lock_irq()来保护临界资源:先禁止中断防止中断来抢,再禁止preempt防止其他进程来抢。
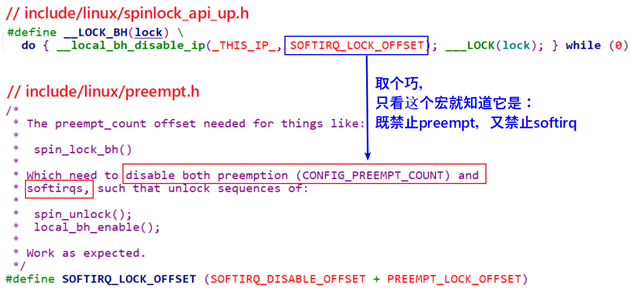
对于spin_lock_bh(),在UP系统中就退化为禁止软件中断和preempt_disable(),如下图所示:
对于spin_lock_irqsave,它跟spin_lock_irq类似,只不过它是先保存中断状态再禁止中断,如下:
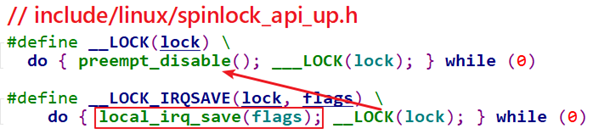
对应的spin_unlock函数就不再讲解。