驱动编写
该章节请参考【20.lcd】工程
修改设备树
自带的设备树关于fb的总共有两个文件arch\arm\boot\dts\目录下imx6ull.dtsi和imx6ull-14x14-evk.dts,我们只需修改imx6ull-14x14-evk.dts即可。
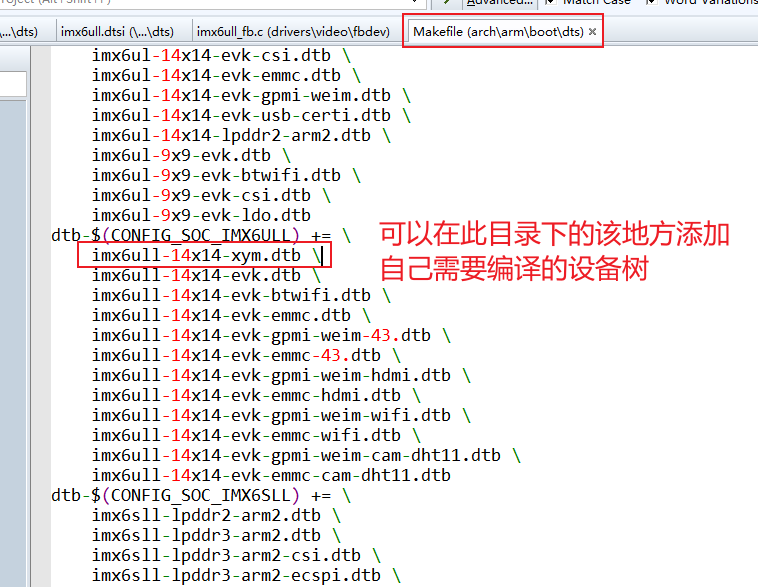
如果不想破坏原有的设备树文件可以拷贝一份arch\arm\boot\dts\目录下的imx6ull-14x14-evk.dts重新命名例如:imx6ull-14x14-xym.dts,然后修改arch\arm\boot\dts\Makefile文件,新增自己的设备树文件即可,如下:这样在make dtbs的时候就会生成imx6ull-14x14-xym.dtb文件。
现在我们修改设备树如下步骤:
arch\arm\boot\dts\imx6ull.dtsi:这里不做修改,说明如下: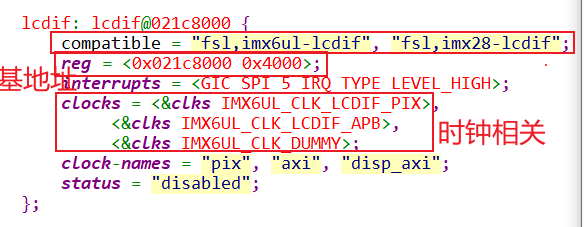
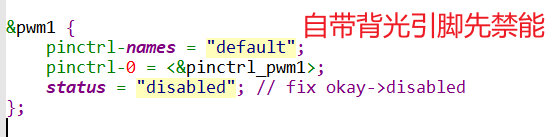
arch\arm\boot\dts\imx6ull-14x14-evk.dts:禁能自带的lcdif和背光PWM,需要修改的地方如下: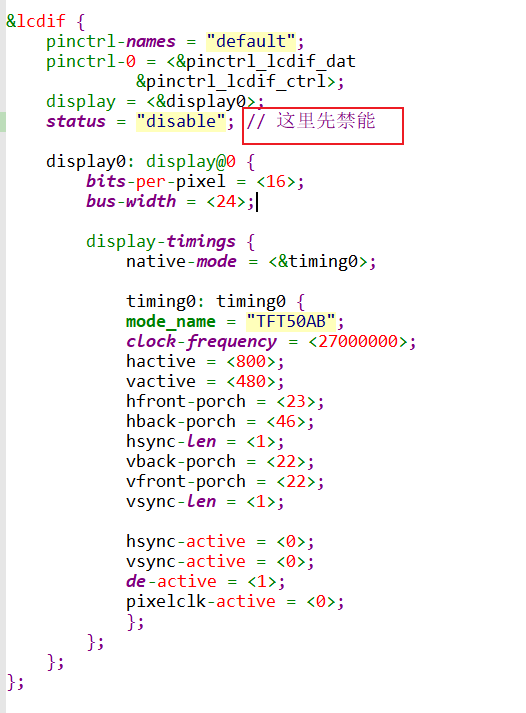
LCD 引脚和背光:需要修改的地方如下
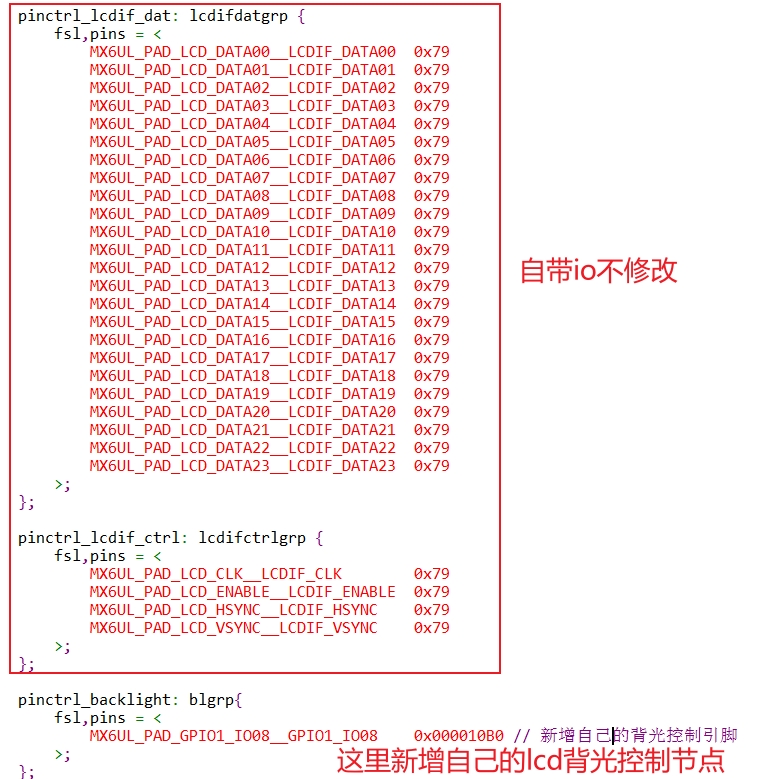 image-20210913191403400
image-20210913191403400新增自己的fb节点如下:在根节点下添加如下:

添加好后完整文件如下:
/*
* Copyright (C) 2016 Freescale Semiconductor, Inc.
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*/
/dts-v1/;
#include <dt-bindings/input/input.h>
#include "imx6ull.dtsi"
/ {
model = "Freescale i.MX6 ULL 14x14 EVK Board";
compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ull";
chosen {
stdout-path = &uart1;
};
memory {
reg = <0x80000000 0x20000000>;
};
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
linux,cma {
compatible = "shared-dma-pool";
reusable;
size = <0x14000000>;
linux,cma-default;
};
};
backlight {
compatible = "pwm-backlight";
pwms = <&pwm1 0 5000000>;
brightness-levels = <0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100>;
default-brightness-level = <50>;
status = "okay";
};
framebuffer-mylcd {
compatible = "flyrobot,lcd_drv"; // 设备树节点名字
reg = <0x021c8000 0x4000>; // 基地值
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_lcdif_dat // 使用pinctrl设置数据线控制线和背光的gpio属性
&pinctrl_lcdif_ctrl
&pinctrl_backlight>;
backlight-gpios = <&gpio1 8 GPIO_ACTIVE_HIGH>;// 默认打开背光
clocks = <&clks IMX6UL_CLK_LCDIF_PIX>, // LCD控制器所需的时钟,这里使用时钟子系统进行控制,pix和axi
<&clks IMX6UL_CLK_LCDIF_APB>;
clock-names = "pix", "axi";
display = <&displayA>;
status = "okay";
displayA: display@A {
bits-per-pixel = <32>; // 一个像素多少个bit 这里使用888 模式一共32bit
bus-width = <24>; // 数据线宽度,这里我们硬件上使用了24根数据线
display-timings {
native-mode = <&timingA>;
timingA: timing0_800x480 {
mode_name = "TFT50AB";
clock-frequency = <50000000>;// 像素时钟
hactive = <800>;
vactive = <480>;
hfront-porch = <22>; // 行前肩
hback-porch = <46>; // 行后肩
hsync-len = <20>; // 行脉宽
vback-porch = <23>; // 场后肩
vfront-porch = <22>; // 场前肩
vsync-len = <3>; // 场脉宽
hsync-active = <0>; // 行数据线有效极性
vsync-active = <0>; // 场数据线有效极性
de-active = <1>; // de数据线有效极性
pixelclk-active = <0>; // 时钟数据线有效极性
};
};
};
};
pxp_v4l2 {
compatible = "fsl,imx6ul-pxp-v4l2", "fsl,imx6sx-pxp-v4l2", "fsl,imx6sl-pxp-v4l2";
status = "okay";
};
regulators {
compatible = "simple-bus";
#address-cells = <1>;
#size-cells = <0>;
reg_can_3v3: regulator@0 {
compatible = "regulator-fixed";
reg = <0>;
regulator-name = "can-3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
/*gpios = <&gpio_spi 3 GPIO_ACTIVE_LOW>;*/
};
reg_wifi_vmmc: regulator@1 {
compatible = "regulator-fixed";
regulator-name = "WIFI_3V3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
gpio = <&gpio1 1 GPIO_ACTIVE_HIGH>;
enable-active-high;
};
reg_vref_3v3: regulator@2 {
compatible = "regulator-fixed";
regulator-name = "vref-3v3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
};
/*
reg_gpio_dvfs: regulator-gpio {
compatible = "regulator-gpio";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_dvfs>;
regulator-min-microvolt = <1300000>;
regulator-max-microvolt = <1400000>;
regulator-name = "gpio_dvfs";
regulator-type = "voltage";
gpios = <&gpio5 3 GPIO_ACTIVE_HIGH>;
states = <1300000 0x1 1400000 0x0>;
};
reg_bt: regulator-bt-reg {
compatible = "regulator-gpio";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_dvfs>;
regulator-min-microvolt = <1300000>;
regulator-max-microvolt = <1400000>;
regulator-name = "gpio_dvfs";
regulator-type = "voltage";
gpios = <&gpio5 3 GPIO_ACTIVE_HIGH>;
states = <1300000 0x1 1400000 0x0>;
};*/
};
/****************************************修改的地�?***************************************************/
/*
leds {
compatible = "gpio-leds";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_led>;
led0: cpu {
label = "cpu";
gpios = <&gpio5 3 GPIO_ACTIVE_LOW>;
default-state = "on";
linux,default-trigger = "heartbeat";
};
};
*/
xym_led {
compatible = "xym-led";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_led>;
led-gpio = <&gpio5 3 GPIO_ACTIVE_LOW>;
};
/****************************************修改的地�?***************************************************/
pwm_leds{
compatible = "pwm-leds";
status = "okay";
red {
label = "red";
active-low;
pwms = <&pwm3 0 5000>;
max-brightness = <255>;
};
blue {
label = "blue";
active-low;
pwms = <&pwm7 0 5000>;
max-brightness = <255>;
};
green {
label = "green";
active-low;
pwms = <&pwm8 0 5000>;
max-brightness = <255>;
};
};
ir_recv:ir-receiver {
compatible = "gpio-ir-receiver";
#gpio-cells = <1>;
gpios = <&gpio1 21 GPIO_ACTIVE_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_remote_control>;
linux,rc-map-name = "rc-lirc";
status = "okay";
};
gpio-keys {
compatible = "gpio-keys";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gpio_keys>;
Key0{
label = "Key 0";
gpios = <&gpio5 1 GPIO_ACTIVE_HIGH>;
linux,code = <KEY_0>;
};
};
sound {
compatible = "fsl,imx6ul-evk-wm8960",
"fsl,imx-audio-wm8960";
model = "wm8960-audio";
cpu-dai = <&sai2>;
audio-codec = <&codec>;
asrc-controller = <&asrc>;
codec-master;
gpr = <&gpr 4 0x100000 0x100000>;
/*
* hp-det = <hp-det-pin hp-det-polarity>;
* hp-det-pin: JD1 JD2 or JD3
* hp-det-polarity = 0: hp detect high for headphone
* hp-det-polarity = 1: hp detect high for speaker
*/
hp-det = <3 1>;
/*hp-det-gpios = <&gpio5 4 0>;
mic-det-gpios = <&gpio5 4 0>;*/
audio-routing =
"Headphone Jack", "HP_L",
"Headphone Jack", "HP_R",
"Ext Spk", "SPK_LP",
"Ext Spk", "SPK_LN",
"Ext Spk", "SPK_RP",
"Ext Spk", "SPK_RN",
"LINPUT2", "Mic Jack",
"LINPUT3", "Mic Jack",
"RINPUT1", "Main MIC",
"RINPUT2", "Main MIC",
"Mic Jack", "MICB",
"Main MIC", "MICB",
"CPU-Playback", "ASRC-Playback",
"Playback", "CPU-Playback",
"ASRC-Capture", "CPU-Capture",
"CPU-Capture", "Capture";
status = "okay";
};
spi4 {
compatible = "spi-gpio";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_spi4>;
pinctrl-assert-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>;
status = "okay";
gpio-sck = <&gpio5 11 0>;
gpio-mosi = <&gpio5 10 0>;
cs-gpios = <&gpio5 7 0>;
num-chipselects = <1>;
#address-cells = <1>;
#size-cells = <0>;
gpio_spi: gpio_spi@0 {
compatible = "fairchild,74hc595";
gpio-controller;
#gpio-cells = <2>;
reg = <0>;
registers-number = <1>;
registers-default = /bits/ 8 <0x57>;
spi-max-frequency = <100000>;
};
};
sound-spdif {
compatible = "fsl,imx-audio-spdif";
model = "imx-spdif";
spdif-controller = <&spdif>;
spdif-in;
spdif-out;
};
sii902x_reset: sii902x-reset {
compatible = "gpio-reset";
reset-gpios = <&gpio_spi 0 GPIO_ACTIVE_LOW>;
reset-delay-us = <100000>;
#reset-cells = <0>;
};
ds18b20{
compatible = "w1-gpio";
gpios = <&gpio1 2 GPIO_ACTIVE_HIGH>;
linux,open-drain;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_onewire>;
status = "disable";
};
dht11{
compatible = "dht11";
gpios = <&gpio1 2 GPIO_ACTIVE_LOW>;
linux,open-drain;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_onewire>;
status = "okay";
};
};
&cpu0 {
arm-supply = <®_arm>;
soc-supply = <®_soc>;
clock-frequency = <800000000>;
/*dc-supply = <®_gpio_dvfs>;*/
};
&clks {
assigned-clocks = <&clks IMX6UL_CLK_PLL4_AUDIO_DIV>;
assigned-clock-rates = <786432000>;
};
&fec1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_enet1>;
phy-mode = "rmii";
phy-handle = <ðphy0>;
status = "okay";
};
&fec2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_enet2>;
phy-mode = "rmii";
phy-handle = <ðphy1>;
status = "okay";
mdio {
#address-cells = <1>;
#size-cells = <0>;
ethphy0: ethernet-phy@2 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <2>;
};
ethphy1: ethernet-phy@1 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <1>;
};
};
};
&flexcan1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flexcan1>;
/*xceiver-supply = <®_can_3v3>;*/
status = "okay";
};
/*
&flexcan2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_flexcan2>;
/*xceiver-supply = <®_can_3v3>;
status = "okay"; /*can & UART2 can not use as same time
};*/
&gpc {
fsl,cpu_pupscr_sw2iso = <0x1>;
fsl,cpu_pupscr_sw = <0x0>;
fsl,cpu_pdnscr_iso2sw = <0x1>;
fsl,cpu_pdnscr_iso = <0x1>;
fsl,ldo-bypass = <0>; /* DCDC, ldo-enable */
};
&i2c1 {
clock-frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>;
status = "okay";
mpu6050@68 {
compatible = "mpu6050,INV_MPU6050";
reg = <0x68>;
position = <1>;
};
gt9xx@5d {
compatible = "goodix,gt9xx";
reg = <0x5d>;
status = "okay";
interrupt-parent = <&gpio5>;
interrupts = <9 IRQ_TYPE_EDGE_FALLING>;
pinctrl-names = "pinctrl_tsc_reset","pinctrl_tsc_irq";
pinctrl-0 = <&pinctrl_tsc_reset>;
pinctrl-1 = <&pinctrl_tsc_irq>;
/*pinctrl-names = "default", "int-output-low", "int-output-high", "int-input";
pinctrl-0 = <&ts_int_default>;
pinctrl-1 = <&ts_int_output_low>;
pinctrl-2 = <&ts_int_output_high>;
pinctrl-3 = <&ts_int_input>;
*/
reset-gpios = <&gpio3 4 GPIO_ACTIVE_LOW>;
irq-gpios = <&gpio5 9 IRQ_TYPE_EDGE_FALLING>;
irq-flags = <2>; /*1:rising 2: falling*/
touchscreen-max-id = <1>;
touchscreen-size-x = <800>;
touchscreen-size-y = <480>;
touchscreen-max-w = <1024>;
touchscreen-max-p = <1024>;
/*touchscreen-key-map = <172>, <158>;*/ /*KEY_HOMEPAGE, KEY_BACK*/
goodix,type-a-report = <0>;
goodix,driver-send-cfg = <0>;
goodix,create-wr-node = <1>;
goodix,wakeup-with-reset = <0>;
goodix,resume-in-workqueue = <0>;
goodix,int-sync = <1>;
goodix,swap-x2y = <0>;
goodix,esd-protect = <0>;
goodix,pen-suppress-finger = <0>;
goodix,auto-update = <0>;
goodix,auto-update-cfg = <0>;
goodix,power-off-sleep = <0>;
/*7*/
goodix,cfg-group0 = [
00 20 03 E0 01 05 0D 00 01 08
28 0F 50 32 03 05 00 00 00 00
00 00 00 00 00 00 00 8A 2A 0C
45 47 0C 08 00 00 00 02 02 2D
00 00 00 00 00 03 64 32 00 00
00 28 64 94 C5 02 07 00 00 04
9C 2C 00 8F 34 00 84 3F 00 7C
4C 00 77 5B 00 77 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 18 16 14 12 10 0E 0C 0A
08 06 04 02 FF FF 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 16 18 1C 1D 1E 1F 20 21
22 24 13 12 10 0F 0A 08 06 04
02 00 FF FF FF FF FF FF 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 00 24 01
];
/*4.3*/
goodix,cfg-group1 = [
97 E0 01 10 01 05 0D 00 01 00
00 05 5A 46 53 11 00 00 11 11
14 14 14 22 0A 04 00 00 00 00
00 00 53 00 14 00 00 84 00 00
3C 00 00 64 1E 28 87 27 08 32
34 05 0D 20 33 60 11 02 24 00
00 64 80 80 14 02 00 00 54 89
68 85 6D 82 72 80 76 7D 7B 7B
00 00 00 00 00 00 00 F0 50 3C
FF FF 07 00 00 00 02 14 14 03
04 00 21 64 0A 00 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 00 00 00 00 00 00 00
32 20 50 3C 3C 00 00 00 00 00
0D 06 0C 05 0B 04 0A 03 FF FF
FF FF FF FF 00 01 02 03 04 05
06 07 08 09 0A 0B 0C 0D FF FF
FF FF FF FF FF FF FF FF FF FF
00 00 00 00 00 00 00 00 00 00
00 00 00 00 3C 00 05 1E 00 02
2A 1E 19 14 02 00 03 0A 05 00
00 00 00 00 00 00 01 FF FF 86
22 03 00 00 33 00 0F 00 00 00
50 3C 50 00 00 00 00 2A 01
];
/*5*/
goodix,cfg-group2 = [
00 20 03 E0 01 05 3C 00 01 08
28 0C 50 32 03 05 00 00 00 00
00 00 00 17 19 1E 14 8B 2B 0D
33 35 0C 08 00 00 00 9A 03 11
00 01 00 00 00 00 00 32 00 00
00 20 58 94 C5 02 00 00 00 04
B0 23 00 93 2B 00 7B 35 00 69
41 00 5B 4F 00 5B 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 02 04 06 08 0A 0C 0E 10
12 14 16 18 1A FF 00 00 00 00
00 00 00 00 00 00 00 00 00 00
00 00 00 02 04 06 08 0A 0C 0F
10 12 13 16 18 1C 1D 1E 1F 20
21 22 24 26 FF FF FF FF 00 00
00 FF FF FF FF FF FF FF FF FF
FF FF FF FF 48 01
];
};
/*
mag3110@0e {
compatible = "fsl,mag3110";
reg = <0x0e>;
position = <2>;
};
fxls8471@1e {
compatible = "fsl,fxls8471";
reg = <0x1e>;
position = <0>;
interrupt-parent = <&gpio5>;
interrupts = <0 8>;
};*/
};
&i2c2 {
clock_frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c2>;
status = "okay";
codec: wm8960@1a {
compatible = "wlf,wm8960";
reg = <0x1a>;
clocks = <&clks IMX6UL_CLK_SAI2>;
clock-names = "mclk";
wlf,shared-lrclk;
};
sii902x: sii902x@39 {
compatible = "SiI,sii902x";
pinctrl-names = "default";
reset-names="sii902x";
pinctrl-0 = <&pinctrl_sii902x>;
resets = <&sii902x_reset>;
interrupt-parent = <&gpio1>;
interrupts = <18 IRQ_TYPE_EDGE_FALLING>;
mode_str ="1360x768M@60";
bits-per-pixel = <16>;
reg = <0x39>;
status = "okay"; /* HDMI 使能 */
};
ov5640: ov5640@3c {
compatible = "ovti,ov5640";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_csi1>;
clocks = <&clks IMX6UL_CLK_CSI>;
clock-names = "csi_mclk";
pwn-gpios = <&gpio_spi 6 1>;
rst-gpios = <&gpio_spi 5 0>;
csi_id = <0>;
mclk = <24000000>;
mclk_source = <0>;
status = "disable"; /* 摄像头使�?*/
port {
ov5640_ep: endpoint {
remote-endpoint = <&csi1_ep>;
};
};
};
};
&csi {
status = "disable"; /* 摄像头总线使能 */
port {
csi1_ep: endpoint {
remote-endpoint = <&ov5640_ep>;
};
};
};
&iomuxc {
pinctrl-names = "default";
imx6ul-evk {
pinctrl_gpmi_nand: gpmi-nand {
fsl,pins = <
MX6UL_PAD_NAND_CLE__RAWNAND_CLE 0xb0b1
MX6UL_PAD_NAND_ALE__RAWNAND_ALE 0xb0b1
MX6UL_PAD_NAND_WP_B__RAWNAND_WP_B 0xb0b1
MX6UL_PAD_NAND_READY_B__RAWNAND_READY_B 0xb000
MX6UL_PAD_NAND_CE0_B__RAWNAND_CE0_B 0xb0b1
MX6UL_PAD_NAND_CE1_B__RAWNAND_CE1_B 0xb0b1
MX6UL_PAD_NAND_RE_B__RAWNAND_RE_B 0xb0b1
MX6UL_PAD_NAND_WE_B__RAWNAND_WE_B 0xb0b1
MX6UL_PAD_NAND_DATA00__RAWNAND_DATA00 0xb0b1
MX6UL_PAD_NAND_DATA01__RAWNAND_DATA01 0xb0b1
MX6UL_PAD_NAND_DATA02__RAWNAND_DATA02 0xb0b1
MX6UL_PAD_NAND_DATA03__RAWNAND_DATA03 0xb0b1
MX6UL_PAD_NAND_DATA04__RAWNAND_DATA04 0xb0b1
MX6UL_PAD_NAND_DATA05__RAWNAND_DATA05 0xb0b1
MX6UL_PAD_NAND_DATA06__RAWNAND_DATA06 0xb0b1
MX6UL_PAD_NAND_DATA07__RAWNAND_DATA07 0xb0b1
>;
};
pinctrl_remote_control: remote_control {
fsl,pins = <
MX6UL_PAD_UART2_RX_DATA__GPIO1_IO21 0x000010B1 /* remote control add by pengjie 20190703*/
>;
};
pinctrl_csi1: csi1grp {
fsl,pins = <
MX6UL_PAD_CSI_MCLK__CSI_MCLK 0x1b088
MX6UL_PAD_CSI_PIXCLK__CSI_PIXCLK 0x1b088
MX6UL_PAD_CSI_VSYNC__CSI_VSYNC 0x1b088
MX6UL_PAD_CSI_HSYNC__CSI_HSYNC 0x1b088
MX6UL_PAD_CSI_DATA00__CSI_DATA02 0x1b088
MX6UL_PAD_CSI_DATA01__CSI_DATA03 0x1b088
MX6UL_PAD_CSI_DATA02__CSI_DATA04 0x1b088
MX6UL_PAD_CSI_DATA03__CSI_DATA05 0x1b088
MX6UL_PAD_CSI_DATA04__CSI_DATA06 0x1b088
MX6UL_PAD_CSI_DATA05__CSI_DATA07 0x1b088
MX6UL_PAD_CSI_DATA06__CSI_DATA08 0x1b088
MX6UL_PAD_CSI_DATA07__CSI_DATA09 0x1b088
>;
};
pinctrl_enet1: enet1grp {
fsl,pins = <
MX6UL_PAD_ENET1_RX_EN__ENET1_RX_EN 0x1b0b0
MX6UL_PAD_ENET1_RX_ER__ENET1_RX_ER 0x1b0b0
MX6UL_PAD_ENET1_RX_DATA0__ENET1_RDATA00 0x1b0b0
MX6UL_PAD_ENET1_RX_DATA1__ENET1_RDATA01 0x1b0b0
MX6UL_PAD_ENET1_TX_EN__ENET1_TX_EN 0x1b0b0
MX6UL_PAD_ENET1_TX_DATA0__ENET1_TDATA00 0x1b0b0
MX6UL_PAD_ENET1_TX_DATA1__ENET1_TDATA01 0x1b0b0
MX6UL_PAD_ENET1_TX_CLK__ENET1_REF_CLK1 0x4001b031
>;
};
pinctrl_enet2: enet2grp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO07__ENET2_MDC 0x1b0b0
MX6UL_PAD_GPIO1_IO06__ENET2_MDIO 0x1b0b0
MX6UL_PAD_ENET2_RX_EN__ENET2_RX_EN 0x1b0b0
MX6UL_PAD_ENET2_RX_ER__ENET2_RX_ER 0x1b0b0
MX6UL_PAD_ENET2_RX_DATA0__ENET2_RDATA00 0x1b0b0
MX6UL_PAD_ENET2_RX_DATA1__ENET2_RDATA01 0x1b0b0
MX6UL_PAD_ENET2_TX_EN__ENET2_TX_EN 0x1b0b0
MX6UL_PAD_ENET2_TX_DATA0__ENET2_TDATA00 0x1b0b0
MX6UL_PAD_ENET2_TX_DATA1__ENET2_TDATA01 0x1b0b0
MX6UL_PAD_ENET2_TX_CLK__ENET2_REF_CLK2 0x4001b031
>;
};
pinctrl_flexcan1: flexcan1grp{
fsl,pins = <
MX6UL_PAD_UART3_RTS_B__FLEXCAN1_RX 0x1b020
MX6UL_PAD_UART3_CTS_B__FLEXCAN1_TX 0x1b020
>;
};
pinctrl_flexcan2: flexcan2grp{
fsl,pins = <
MX6UL_PAD_UART2_RTS_B__FLEXCAN2_RX 0x1b020
MX6UL_PAD_UART2_CTS_B__FLEXCAN2_TX 0x1b020
>;
};
pinctrl_i2c1: i2c1grp {
fsl,pins = <
MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x4001b8b0
MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x4001b8b0
>;
};
pinctrl_i2c2: i2c2grp {
fsl,pins = <
MX6UL_PAD_UART5_TX_DATA__I2C2_SCL 0x4001b8b0
MX6UL_PAD_UART5_RX_DATA__I2C2_SDA 0x4001b8b0
>;
};
pinctrl_lcdif_dat: lcdifdatgrp {
fsl,pins = <
MX6UL_PAD_LCD_DATA00__LCDIF_DATA00 0x79
MX6UL_PAD_LCD_DATA01__LCDIF_DATA01 0x79
MX6UL_PAD_LCD_DATA02__LCDIF_DATA02 0x79
MX6UL_PAD_LCD_DATA03__LCDIF_DATA03 0x79
MX6UL_PAD_LCD_DATA04__LCDIF_DATA04 0x79
MX6UL_PAD_LCD_DATA05__LCDIF_DATA05 0x79
MX6UL_PAD_LCD_DATA06__LCDIF_DATA06 0x79
MX6UL_PAD_LCD_DATA07__LCDIF_DATA07 0x79
MX6UL_PAD_LCD_DATA08__LCDIF_DATA08 0x79
MX6UL_PAD_LCD_DATA09__LCDIF_DATA09 0x79
MX6UL_PAD_LCD_DATA10__LCDIF_DATA10 0x79
MX6UL_PAD_LCD_DATA11__LCDIF_DATA11 0x79
MX6UL_PAD_LCD_DATA12__LCDIF_DATA12 0x79
MX6UL_PAD_LCD_DATA13__LCDIF_DATA13 0x79
MX6UL_PAD_LCD_DATA14__LCDIF_DATA14 0x79
MX6UL_PAD_LCD_DATA15__LCDIF_DATA15 0x79
MX6UL_PAD_LCD_DATA16__LCDIF_DATA16 0x79
MX6UL_PAD_LCD_DATA17__LCDIF_DATA17 0x79
MX6UL_PAD_LCD_DATA18__LCDIF_DATA18 0x79
MX6UL_PAD_LCD_DATA19__LCDIF_DATA19 0x79
MX6UL_PAD_LCD_DATA20__LCDIF_DATA20 0x79
MX6UL_PAD_LCD_DATA21__LCDIF_DATA21 0x79
MX6UL_PAD_LCD_DATA22__LCDIF_DATA22 0x79
MX6UL_PAD_LCD_DATA23__LCDIF_DATA23 0x79
>;
};
pinctrl_lcdif_ctrl: lcdifctrlgrp {
fsl,pins = <
MX6UL_PAD_LCD_CLK__LCDIF_CLK 0x79
MX6UL_PAD_LCD_ENABLE__LCDIF_ENABLE 0x79
MX6UL_PAD_LCD_HSYNC__LCDIF_HSYNC 0x79
MX6UL_PAD_LCD_VSYNC__LCDIF_VSYNC 0x79
>;
};
pinctrl_backlight: blgrp{
fsl,pins = <
MX6UL_PAD_GPIO1_IO08__GPIO1_IO08 0x000010B0 // 新增自己的背光控制引脚
>;
};
pinctrl_pwm1: pwm1grp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO08__PWM1_OUT 0x000010B1
>;
};
pinctrl_pwm3: pwm3grp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO04__PWM3_OUT 0x000010B1
>;
};
pinctrl_pwm7: pwm7grp {
fsl,pins = <
MX6UL_PAD_CSI_VSYNC__PWM7_OUT 0x000010B1
>;
};
pinctrl_pwm8: pwm8grp {
fsl,pins = <
MX6UL_PAD_CSI_HSYNC__PWM8_OUT 0x000010B1
>;
};
pinctrl_qspi: qspigrp {
fsl,pins = <
MX6UL_PAD_NAND_WP_B__QSPI_A_SCLK 0x70a1
MX6UL_PAD_NAND_READY_B__QSPI_A_DATA00 0x70a1
MX6UL_PAD_NAND_CE0_B__QSPI_A_DATA01 0x70a1
MX6UL_PAD_NAND_CE1_B__QSPI_A_DATA02 0x70a1
MX6UL_PAD_NAND_CLE__QSPI_A_DATA03 0x70a1
MX6UL_PAD_NAND_DQS__QSPI_A_SS0_B 0x70a1
>;
};
pinctrl_sai2: sai2grp {
fsl,pins = <
MX6UL_PAD_JTAG_TDI__SAI2_TX_BCLK 0x17088
MX6UL_PAD_JTAG_TDO__SAI2_TX_SYNC 0x17088
MX6UL_PAD_JTAG_TRST_B__SAI2_TX_DATA 0x11088
MX6UL_PAD_JTAG_TCK__SAI2_RX_DATA 0x11088
MX6UL_PAD_JTAG_TMS__SAI2_MCLK 0x17088
>;
};
pinctrl_spdif: spdifgrp {
fsl,pins = <
MX6UL_PAD_JTAG_MOD__SPDIF_OUT 0x1b0b0
MX6UL_PAD_GPIO1_IO09__SPDIF_IN 0x1b0b0
>;
};
pinctrl_uart1: uart1grp {
fsl,pins = <
MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 0x1b0b1
MX6UL_PAD_UART1_RX_DATA__UART1_DCE_RX 0x1b0b1
>;
};
pinctrl_uart2: uart2grp {
fsl,pins = <
MX6UL_PAD_UART2_TX_DATA__UART2_DCE_TX 0x1b0b1
MX6UL_PAD_UART2_RX_DATA__UART2_DCE_RX 0x1b0b1
>;
};
pinctrl_uart3: uart3grp {
fsl,pins = <
MX6UL_PAD_UART3_TX_DATA__UART3_DCE_TX 0x1b0b1
MX6UL_PAD_UART3_RX_DATA__UART3_DCE_RX 0x1b0b1
>;
};
pinctrl_uart2dte: uart2dtegrp {
fsl,pins = <
MX6UL_PAD_UART2_TX_DATA__UART2_DCE_TX 0x1b0b1
MX6UL_PAD_UART2_RX_DATA__UART2_DCE_RX 0x1b0b1
/*MX6UL_PAD_UART3_RX_DATA__UART2_DCE_RTS 0x1b0b1
MX6UL_PAD_UART3_TX_DATA__UART2_DCE_CTS 0x1b0b1 pengjie 20190622*/
MX6UL_PAD_UART2_CTS_B__UART2_DCE_CTS 0x1b0b1
MX6UL_PAD_UART2_RTS_B__UART2_DCE_RTS 0x1b0b1
>;
};
pinctrl_485: 485grp {
fsl,pins = <
MX6UL_PAD_UART2_TX_DATA__UART2_DCE_TX 0x1b0b1
MX6UL_PAD_UART2_RX_DATA__UART2_DCE_RX 0x1b0b1
MX6UL_PAD_UART2_CTS_B__UART2_DCE_CTS 0x1b0b1 /* RS485 RE/DE */
>;
};
pinctrl_usdhc1: usdhc1grp {
fsl,pins = <
MX6UL_PAD_SD1_CMD__USDHC1_CMD 0x17059
MX6UL_PAD_SD1_CLK__USDHC1_CLK 0x10071
MX6UL_PAD_SD1_DATA0__USDHC1_DATA0 0x17059
MX6UL_PAD_SD1_DATA1__USDHC1_DATA1 0x17059
MX6UL_PAD_SD1_DATA2__USDHC1_DATA2 0x17059
MX6UL_PAD_SD1_DATA3__USDHC1_DATA3 0x17059
>;
};
pinctrl_usdhc1_100mhz: usdhc1grp100mhz {
fsl,pins = <
MX6UL_PAD_SD1_CMD__USDHC1_CMD 0x170b9
MX6UL_PAD_SD1_CLK__USDHC1_CLK 0x100b9
MX6UL_PAD_SD1_DATA0__USDHC1_DATA0 0x170b9
MX6UL_PAD_SD1_DATA1__USDHC1_DATA1 0x170b9
MX6UL_PAD_SD1_DATA2__USDHC1_DATA2 0x170b9
MX6UL_PAD_SD1_DATA3__USDHC1_DATA3 0x170b9
>;
};
pinctrl_usdhc1_200mhz: usdhc1grp200mhz {
fsl,pins = <
MX6UL_PAD_SD1_CMD__USDHC1_CMD 0x170f9
MX6UL_PAD_SD1_CLK__USDHC1_CLK 0x100f9
MX6UL_PAD_SD1_DATA0__USDHC1_DATA0 0x170f9
MX6UL_PAD_SD1_DATA1__USDHC1_DATA1 0x170f9
MX6UL_PAD_SD1_DATA2__USDHC1_DATA2 0x170f9
MX6UL_PAD_SD1_DATA3__USDHC1_DATA3 0x170f9
>;
};
pinctrl_usdhc2: usdhc2grp {
fsl,pins = <
MX6UL_PAD_NAND_RE_B__USDHC2_CLK 0x10069
MX6UL_PAD_NAND_WE_B__USDHC2_CMD 0x17059
MX6UL_PAD_NAND_DATA00__USDHC2_DATA0 0x17059
MX6UL_PAD_NAND_DATA01__USDHC2_DATA1 0x17059
MX6UL_PAD_NAND_DATA02__USDHC2_DATA2 0x17059
MX6UL_PAD_NAND_DATA03__USDHC2_DATA3 0x17059
>;
};
pinctrl_usdhc2_8bit: usdhc2grp_8bit {
fsl,pins = <
MX6UL_PAD_NAND_RE_B__USDHC2_CLK 0x10069
MX6UL_PAD_NAND_WE_B__USDHC2_CMD 0x17059
MX6UL_PAD_NAND_DATA00__USDHC2_DATA0 0x17059
MX6UL_PAD_NAND_DATA01__USDHC2_DATA1 0x17059
MX6UL_PAD_NAND_DATA02__USDHC2_DATA2 0x17059
MX6UL_PAD_NAND_DATA03__USDHC2_DATA3 0x17059
MX6UL_PAD_NAND_DATA04__USDHC2_DATA4 0x17059
MX6UL_PAD_NAND_DATA05__USDHC2_DATA5 0x17059
MX6UL_PAD_NAND_DATA06__USDHC2_DATA6 0x17059
MX6UL_PAD_NAND_DATA07__USDHC2_DATA7 0x17059
>;
};
pinctrl_usdhc2_8bit_100mhz: usdhc2grp_8bit_100mhz {
fsl,pins = <
MX6UL_PAD_NAND_RE_B__USDHC2_CLK 0x100b9
MX6UL_PAD_NAND_WE_B__USDHC2_CMD 0x170b9
MX6UL_PAD_NAND_DATA00__USDHC2_DATA0 0x170b9
MX6UL_PAD_NAND_DATA01__USDHC2_DATA1 0x170b9
MX6UL_PAD_NAND_DATA02__USDHC2_DATA2 0x170b9
MX6UL_PAD_NAND_DATA03__USDHC2_DATA3 0x170b9
MX6UL_PAD_NAND_DATA04__USDHC2_DATA4 0x170b9
MX6UL_PAD_NAND_DATA05__USDHC2_DATA5 0x170b9
MX6UL_PAD_NAND_DATA06__USDHC2_DATA6 0x170b9
MX6UL_PAD_NAND_DATA07__USDHC2_DATA7 0x170b9
>;
};
pinctrl_usdhc2_8bit_200mhz: usdhc2grp_8bit_200mhz {
fsl,pins = <
MX6UL_PAD_NAND_RE_B__USDHC2_CLK 0x100f9
MX6UL_PAD_NAND_WE_B__USDHC2_CMD 0x170f9
MX6UL_PAD_NAND_DATA00__USDHC2_DATA0 0x170f9
MX6UL_PAD_NAND_DATA01__USDHC2_DATA1 0x170f9
MX6UL_PAD_NAND_DATA02__USDHC2_DATA2 0x170f9
MX6UL_PAD_NAND_DATA03__USDHC2_DATA3 0x170f9
MX6UL_PAD_NAND_DATA04__USDHC2_DATA4 0x170f9
MX6UL_PAD_NAND_DATA05__USDHC2_DATA5 0x170f9
MX6UL_PAD_NAND_DATA06__USDHC2_DATA6 0x170f9
MX6UL_PAD_NAND_DATA07__USDHC2_DATA7 0x170f9
>;
};
pinctrl_tsc_reset: tscresetgrp {
fsl,pins = <
/* used for tsc reset */
MX6UL_PAD_LCD_RESET__GPIO3_IO04 0x05
>;
};
pinctrl_onewire: onewire {
fsl,pins = <
//MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0x000090B1 DHT11
MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0x400138B1
>;
};
pinctrl_sii902x: hdmigrp {
fsl,pins = <
MX6UL_PAD_UART1_CTS_B__GPIO1_IO18 0x59
>;
};
pinctrl_adc1: adc1grp{
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x000010B1
>;
};
/*
pinctrl_beep: beepgrp{
fsl,pins = <
MX6UL_PAD_UART1_RTS_B__GPIO1_IO19 0x000050B1
>;
};
*/
};
};
&iomuxc_snvs {
pinctrl-names = "default_snvs";
pinctrl-0 = <&pinctrl_tsc_irq>;
imx6ul-evk {
/* MPU6050 intterrupt*/
pinctrl_hog_2: hoggrp-2 {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER0__GPIO5_IO00 0x80000000
>;
};
/*
pinctrl_dvfs: dvfsgrp {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03 0x79
>;
};
*/
pinctrl_gpio_keys: keysgrp{
fsl,pins = <
MX6UL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x000110A1
>;
};
pinctrl_spi4: spi4grp {
fsl,pins = <
MX6ULL_PAD_BOOT_MODE0__GPIO5_IO10 0x70a1
MX6ULL_PAD_BOOT_MODE1__GPIO5_IO11 0x70a1
MX6ULL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x70a1
MX6ULL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x80000000
>;
};
pinctrl_led: ledgrp {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03 0x1b0b0
>;
};
pinctrl_sai2_hp_det_b: sai2_hp_det_grp {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER4__GPIO5_IO04 0x000110A1
>;
};
pinctrl_tsc_irq: tsc_irq {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER9__GPIO5_IO09 0x4001b8b0
>;
};
};
};
&lcdif {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_lcdif_dat
&pinctrl_lcdif_ctrl>;
display = <&display0>;
status = "disable"; // 这里先禁能
display0: display@0 {
bits-per-pixel = <16>;
bus-width = <24>;
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
mode_name = "TFT50AB";
clock-frequency = <27000000>;
hactive = <800>;
vactive = <480>;
hfront-porch = <23>;
hback-porch = <46>;
hsync-len = <1>;
vback-porch = <22>;
vfront-porch = <22>;
vsync-len = <1>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <1>;
pixelclk-active = <0>;
};
};
};
};
&pwm1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pwm1>;
status = "disabled"; // fix okay->disabled
};
&pwm3 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pwm3>;
status = "okay";
};
&pwm7 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pwm7>;
status = "okay";
};
&pwm8 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pwm8>;
status = "okay";
};
&pxp {
status = "okay";
};
/*
&qspi {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_qspi>;
status = "okay";
ddrsmp=<0>;
flash0: n25q256a@0 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "micron,n25q256a";
spi-max-frequency = <29000000>;
spi-nor,ddr-quad-read-dummy = <6>;
reg = <0>;
};
};
*/
&sai2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_sai2>;
/*&pinctrl_sai2_hp_det_b>;*/
assigned-clocks = <&clks IMX6UL_CLK_SAI2_SEL>,
<&clks IMX6UL_CLK_SAI2>;
assigned-clock-parents = <&clks IMX6UL_CLK_PLL4_AUDIO_DIV>;
assigned-clock-rates = <0>, <12288000>;
status = "okay";
};
&uart1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_uart1>;
status = "okay";
};
/*
&uart2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_uart2>;
/*fsl,uart-has-rtscts;
/* for DTE mode, add below change
/* fsl,dte-mode;
/*pinctrl-0 = <&pinctrl_uart2dte>;
status = "disable";
};*/
&uart2{
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_485>;
fsl,rs485-gpio-txen = <&gpio1 31 GPIO_ACTIVE_HIGH>;
linux,rs485-enabled-at-boot-time;
status = "disable";
};
&uart3{
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_uart3>;
status = "okay";
};
&usbotg1 {
dr_mode = "otg";
srp-disable;
hnp-disable;
adp-disable;
status = "okay";
};
&usbotg2 {
dr_mode = "host";
disable-over-current;
status = "okay";
};
&usbphy1 {
tx-d-cal = <0x5>;
};
&usbphy2 {
tx-d-cal = <0x5>;
};
&usdhc1 {
pinctrl-names = "default", "state_100mhz", "state_200mhz";
pinctrl-0 = <&pinctrl_usdhc1>;
pinctrl-1 = <&pinctrl_usdhc1_100mhz>;
pinctrl-2 = <&pinctrl_usdhc1_200mhz>;
/*cd-gpios = <&gpio1 1 GPIO_ACTIVE_LOW>;*/
keep-power-in-suspend;
enable-sdio-wakeup;
vmmc-supply = <®_wifi_vmmc>;
status = "okay";
};
&usdhc2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_usdhc2>;
non-removable;
status = "disable";
};
&gpmi {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gpmi_nand>;
status = "okay";
nand-on-flash-bbt;
};
/*
&wdog1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_wdog>;
fsl,wdog_b;
};
*/
&spdif {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_spdif>;
assigned-clocks = <&clks IMX6UL_CLK_SPDIF_SEL>,
<&clks IMX6UL_CLK_SPDIF_PODF>;
assigned-clock-parents = <&clks IMX6UL_CLK_PLL4_AUDIO_DIV>;
assigned-clock-rates = <0>, <49152000>;
status = "okay";
};
&adc1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_adc1>;
vref-supply = <®_vref_3v3>;
num-channels = <4>; //此参数为ADC的个�? status = "okay";
};
&gpt2 {
status = "okay";
};
新增驱动文件
屏蔽掉以前的设备驱动,新增自己的:修改文件
drivers\video\fbdev\Makefile如下:
新增文件
drivers\video\fbdev\imx6ull_fb.c:内如如下:#include <linux/module.h> #include <linux/kernel.h> #include <linux/err.h> #include <linux/errno.h> #include <linux/string.h> #include <linux/mm.h> #include <linux/slab.h> #include <linux/delay.h> #include <linux/fb.h> #include <linux/init.h> #include <linux/dma-mapping.h> #include <linux/interrupt.h> #include <linux/platform_device.h> #include <linux/clk.h> #include <linux/cpufreq.h> #include <linux/io.h> #include <video/display_timing.h> #include <video/of_display_timing.h> #include <linux/gpio/consumer.h> #include <asm/div64.h> #include <asm/mach/map.h> #define _IMX6ULL_DEBUG_EN #ifdef _IMX6ULL_DEBUG_EN #define _DEBUG_PRINT(...) \ do {\ printk("[%s:%s:%d]:", __FILE__, __FUNCTION__,__LINE__); \ printk(__VA_ARGS__);\ } while (0) #else #define _DEBUG_PRINT(...) #endif struct imx6ull_lcdif { volatile unsigned int CTRL; volatile unsigned int CTRL_SET; volatile unsigned int CTRL_CLR; volatile unsigned int CTRL_TOG; volatile unsigned int CTRL1; volatile unsigned int CTRL1_SET; volatile unsigned int CTRL1_CLR; volatile unsigned int CTRL1_TOG; volatile unsigned int CTRL2; volatile unsigned int CTRL2_SET; volatile unsigned int CTRL2_CLR; volatile unsigned int CTRL2_TOG; volatile unsigned int TRANSFER_COUNT; unsigned char RESERVED_0[12]; volatile unsigned int CUR_BUF; unsigned char RESERVED_1[12]; volatile unsigned int NEXT_BUF; unsigned char RESERVED_2[12]; volatile unsigned int TIMING; unsigned char RESERVED_3[12]; volatile unsigned int VDCTRL0; volatile unsigned int VDCTRL0_SET; volatile unsigned int VDCTRL0_CLR; volatile unsigned int VDCTRL0_TOG; volatile unsigned int VDCTRL1; unsigned char RESERVED_4[12]; volatile unsigned int VDCTRL2; unsigned char RESERVED_5[12]; volatile unsigned int VDCTRL3; unsigned char RESERVED_6[12]; volatile unsigned int VDCTRL4; unsigned char RESERVED_7[12]; volatile unsigned int DVICTRL0; unsigned char RESERVED_8[12]; volatile unsigned int DVICTRL1; unsigned char RESERVED_9[12]; volatile unsigned int DVICTRL2; unsigned char RESERVED_10[12]; volatile unsigned int DVICTRL3; unsigned char RESERVED_11[12]; volatile unsigned int DVICTRL4; unsigned char RESERVED_12[12]; volatile unsigned int CSC_COEFF0; unsigned char RESERVED_13[12]; volatile unsigned int CSC_COEFF1; unsigned char RESERVED_14[12]; volatile unsigned int CSC_COEFF2; unsigned char RESERVED_15[12]; volatile unsigned int CSC_COEFF3; unsigned char RESERVED_16[12]; volatile unsigned int CSC_COEFF4; unsigned char RESERVED_17[12]; volatile unsigned int CSC_OFFSET; unsigned char RESERVED_18[12]; volatile unsigned int CSC_LIMIT; unsigned char RESERVED_19[12]; volatile unsigned int DATA; unsigned char RESERVED_20[12]; volatile unsigned int BM_ERROR_STAT; unsigned char RESERVED_21[12]; volatile unsigned int CRC_STAT; unsigned char RESERVED_22[12]; volatile unsigned int STAT; unsigned char RESERVED_23[76]; volatile unsigned int THRES; unsigned char RESERVED_24[12]; volatile unsigned int AS_CTRL; unsigned char RESERVED_25[12]; volatile unsigned int AS_BUF; unsigned char RESERVED_26[12]; volatile unsigned int AS_NEXT_BUF; unsigned char RESERVED_27[12]; volatile unsigned int AS_CLRKEYLOW; unsigned char RESERVED_28[12]; volatile unsigned int AS_CLRKEYHIGH; unsigned char RESERVED_29[12]; volatile unsigned int SYNC_DELAY; } ; /* LCD控制参数结构体 */ struct lcd_dev{ unsigned int height; /* LCD屏幕高度 */ unsigned int width; /* LCD屏幕宽度 */ unsigned int pix_size; /* 输入LCD每个像素所占bit位数:fb_bpp*/ unsigned int data_width; /* 输出数据线宽度:lcd_bpp */ unsigned int vspw; /* 场脉宽 */ unsigned int vbpd; /* 场后肩 */ unsigned int vfpd; /* 场前肩 */ unsigned int hspw; /* 行脉宽 */ unsigned int hbpd; /* 行后肩 */ unsigned int hfpd; /* 行前肩 */ unsigned char hsync_pol; /* 行信号极性 */ unsigned char vsync_pol; /* 场信号极性 */ unsigned char de_pol; /* de信号极性 */ unsigned char clk_pol; /* 时钟信号极性 */ unsigned int pixe_clk; /* 数据信号极性 */ struct imx6ull_lcdif *LCDIF; unsigned int phy_addr; struct clk* clk_pix; struct clk* clk_axi; struct gpio_desc *bl_gpio; struct fb_info *info; }; /* * @description : 复位ELCDIF接口 * @param : 无 * @return : 无 */ void lcd_reset(struct imx6ull_lcdif *LCDIF) { LCDIF->CTRL = 1<<31; /* 强制复位 */ } /* * @description : 结束复位ELCDIF接口 * @param : 无 * @return : 无 */ void lcd_noreset(struct imx6ull_lcdif *LCDIF) { LCDIF->CTRL = 0<<31; /* 取消强制复位 */ } static unsigned int pseudo_palette[16]; static void lcd_controller_enable(struct imx6ull_lcdif *lcdif) { lcdif->CTRL |= (1<<0); } static int lcd_controller_init(struct lcd_dev *host) { unsigned int lcd_data_bus_width; unsigned int fb_width; struct imx6ull_lcdif *LCDIF = host->LCDIF; unsigned int height = host->height ; unsigned int width = host->width; unsigned int fb_bpp = host->pix_size; // fb每个像素占bit数 unsigned int lcd_bpp = host->data_width; // 输出数据总线宽度 unsigned int vspw = host->vspw; // 场脉宽 unsigned int vbpd = host->vbpd; // 下边界 unsigned int vfpd = host->vfpd; // 上边界 unsigned int hspw = host->hspw; // 行脉宽 unsigned int hbpd = host->hbpd; // 左边界 unsigned int hfpd = host->hfpd; // 右边界 unsigned int vsync_pol = host->vsync_pol; unsigned int hsync_pol = host->hsync_pol; unsigned int clk_pol = host->clk_pol; unsigned int de_pol = host->de_pol; if (lcd_bpp == 24) lcd_data_bus_width = 0x3; else if (lcd_bpp == 18) lcd_data_bus_width = 0x2; else if (lcd_bpp == 8) lcd_data_bus_width = 0x1; else if (lcd_bpp == 16) lcd_data_bus_width = 0x0; else return -1; if (fb_bpp == 24 || fb_bpp == 32) fb_width = 0x3; else if (fb_bpp == 18) fb_width = 0x2; else if (fb_bpp == 8) fb_width = 0x1; else if (fb_bpp == 16) fb_width = 0x0; else return -1; lcd_reset(LCDIF); /* 复位LCD */ mdelay(10); /* 延时10ms */ lcd_noreset(LCDIF); /* 结束复位 */ /* * 初始化LCD控制器的CTRL寄存器 * [19] : 1 : DOTCLK和DVI modes需要设置为1 * [17] : 1 : 设置为1工作在DOTCLK模式 * [15:14] : 00 : 输入数据不交换(小端模式)默认就为0,不需设置 * [13:12] : 00 : CSC数据不交换(小端模式)默认就为0,不需设置 * [11:10] : 11 : 数据总线为24bit * [9:8] 根据显示屏资源文件bpp来设置:8位0x1 , 16位0x0 ,24位0x3 * [5] : 1 : 设置elcdif工作在主机模式 * [1] : 0 : 24位数据均是有效数据,默认就为0,不需设置 */ LCDIF->CTRL = (0<<30) | (0<<29) | (0<<28) | (1<<19) | (1<<17) | (lcd_data_bus_width<< 10) | (fb_width << 8) | (1<<5); /* * 设置ELCDIF的寄存器CTRL1 * 根据bpp设置,bpp为24或32才设置 * [19:16] : 111 :表示ARGB传输格式模式下,传输24位无压缩数据,A通道不用传输) */ if(fb_bpp == 24 || fb_bpp == 32) { LCDIF->CTRL1 &= ~(0xf << 16); LCDIF->CTRL1 |= (0x7 << 16); } else LCDIF->CTRL1 |= (0xf << 16); /* * 初始化ELCDIF的寄存器TRANSFER_COUNT寄存器 * bit [31:16] : 高度 * bit [15:0] : 宽度 */ LCDIF->TRANSFER_COUNT = (height << 16) | (width << 0); /* * 设置ELCDIF的VDCTRL0寄存器 * [29] 0 : VSYNC输出 ,默认为0,无需设置 * [28] 1 : 在DOTCLK模式下,设置1硬件会产生使能ENABLE输出 * [27] 0 : VSYNC低电平有效 ,根据屏幕配置文件将其设置为0 * [26] 0 : HSYNC低电平有效 , 根据屏幕配置文件将其设置为0 * [25] 1 : DOTCLK下降沿有效 ,根据屏幕配置文件将其设置为1 * [24] 1 : ENABLE信号高电平有效,根据屏幕配置文件将其设置为1 * [21] 1 : 帧同步周期单位,DOTCLK mode设置为1 * [20] 1 : 帧同步脉冲宽度单位,DOTCLK mode设置为1 * [17:0] : vysnc脉冲宽度 */ LCDIF->VDCTRL0 = (1 << 28)| ( vsync_pol << 27)| ( hsync_pol << 26)| ( clk_pol << 25)| ( de_pol << 24)| (1 << 21)| (1 << 20)| (vspw << 0); /* * 初始化ELCDIF的VDCTRL1寄存器 * 设置VSYNC总周期 */ LCDIF->VDCTRL1 = height + vspw + vfpd + vbpd; //VSYNC周期 /* * 初始化ELCDIF的VDCTRL2寄存器 * 设置HSYNC周期 * bit[31:18] :hsw * bit[17:0] : HSYNC总周期 */ LCDIF->VDCTRL2 = (hspw << 18) | (width + hspw + hfpd + hbpd); /* * 初始化ELCDIF的VDCTRL3寄存器 * 设置HSYNC周期 * bit[27:16] :水平等待时钟数 * bit[15:0] : 垂直等待时钟数 */ LCDIF->VDCTRL3 = ((hbpd + hspw) << 16) | (vbpd + vspw); /* * 初始化ELCDIF的VDCTRL4寄存器 * 设置HSYNC周期 * bit[18] 1 : 当使用VSHYNC、HSYNC、DOTCLK的话此为置1 * bit[17:0] : 宽度 */ LCDIF->VDCTRL4 = (1<<18) | (width); /* * 设置ELCDIF的CUR_BUF和NEXT_BUF寄存器 * CUR_BUF : 当前显存地址 * NEXT_BUF : 下一帧显存地址 * 方便运算,都设置为同一个显存地址 */ LCDIF->CUR_BUF = host->phy_addr; LCDIF->NEXT_BUF = host->phy_addr; return 0; } static void mylcd_prase_dt(struct platform_device *pdev,struct lcd_dev *host) { struct device_node *display_np; int ret; struct display_timings *timings = NULL; struct display_timing *dt = NULL; struct gpio_desc *bl_gpio; struct clk* clk_pix; struct clk* clk_axi; unsigned int data_width; unsigned int pix_size; display_np = of_parse_phandle(pdev->dev.of_node, "display", 0); /* get common info */ ret = of_property_read_u32(display_np, "bus-width", &data_width); // 获取设备树数据宽度 ret = of_property_read_u32(display_np, "bits-per-pixel",&pix_size); // 获取设备树一个像素bit数 /* get timming */ timings = of_get_display_timings(display_np); dt = timings->timings[timings->native_mode]; /* get clk from device tree */ clk_pix = devm_clk_get(&pdev->dev, "pix"); clk_axi = devm_clk_get(&pdev->dev, "axi"); /* get gpio from device tree */ bl_gpio = gpiod_get(&pdev->dev, "backlight", 0); // 获取设备树 背光 gpio host->pixe_clk = dt->pixelclock.typ; host->height = dt->vactive.typ; host->width = dt->hactive.typ; host->pix_size = pix_size; host->data_width = data_width; host->vspw = dt->vsync_len.typ; host->vfpd = dt->vfront_porch.typ; host->vbpd = dt->vback_porch.typ; host->hspw = dt->hsync_len.typ; host->hfpd = dt->hfront_porch.typ; host->hbpd = dt->hback_porch.typ; host->clk_axi = clk_axi; host->clk_pix = clk_pix; host->bl_gpio = bl_gpio; if (dt->flags & DISPLAY_FLAGS_HSYNC_HIGH){ host->hsync_pol = 1; }else{ host->hsync_pol = 0; } if (dt->flags & DISPLAY_FLAGS_VSYNC_HIGH){ host->vsync_pol = 1; }else{ host->vsync_pol = 0; } if (dt->flags & DISPLAY_FLAGS_DE_HIGH){ host->de_pol = 1; }else{ host->de_pol = 0; } if (dt->flags & DISPLAY_FLAGS_PIXDATA_POSEDGE){ host->clk_pol = 1; }else{ host->clk_pol = 0; } _DEBUG_PRINT("bits-per-pixel:%d bus-width:%d\n" ,host->pix_size,host->data_width); } /* from pxafb.c */ static inline unsigned int chan_to_field(unsigned int chan, struct fb_bitfield *bf) { chan &= 0xffff; chan >>= 16 - bf->length; return chan << bf->offset; } static int mylcd_setcolreg(unsigned regno, unsigned red, unsigned green, unsigned blue, unsigned transp, struct fb_info *info) { unsigned int val; unsigned int *pal; /* dprintk("setcol: regno=%d, rgb=%d,%d,%d\n", regno, red, green, blue); */ switch (info->fix.visual) { case FB_VISUAL_TRUECOLOR: /* true-colour, use pseudo-palette */ if (regno < 16) { pal = info->pseudo_palette; val = chan_to_field(red, &info->var.red); val |= chan_to_field(green, &info->var.green); val |= chan_to_field(blue, &info->var.blue); pal[regno] = val; } break; default: return 1; /* unknown type */ } return 0; } static struct fb_ops myfb_ops = { .owner = THIS_MODULE, .fb_setcolreg = mylcd_setcolreg, .fb_fillrect = cfb_fillrect, .fb_copyarea = cfb_copyarea, .fb_imageblit = cfb_imageblit, }; struct lcd_dev host; static int mylcd_probe(struct platform_device *pdev) { dma_addr_t phy_addr; int ret; struct imx6ull_lcdif *lcdif; struct resource *res; mylcd_prase_dt(pdev,&host); /* config bl_gpio as output */ gpiod_direction_output(host.bl_gpio, 1); /* set clk rate */ clk_set_rate(host.clk_pix,host.pixe_clk); // 设置设备树 pix 时钟 /* enable clk */ clk_prepare_enable(host.clk_pix); clk_prepare_enable(host.clk_axi); // 使能时钟 /* 1.1 分配fb_info */ host.info = framebuffer_alloc(0, NULL); /* 1.2 设置fb_info */ /* a. var : LCD分辨率、颜色格式 */ host.info->var.xres_virtual = host.info->var.xres = host.width; host.info->var.yres_virtual = host.info->var.yres = host.height; host.info->var.bits_per_pixel = host.pix_size; /* rgb888 */ host.info->var.red.offset = 16; host.info->var.red.length = 8; host.info->var.green.offset = 8; host.info->var.green.length = 8; host.info->var.blue.offset = 0; host.info->var.blue.length = 8; /* b. fix */ strcpy(host.info->fix.id, "flyrobot_lcd"); host.info->fix.smem_len = host.info->var.xres * host.info->var.yres * host.info->var.bits_per_pixel / 8; // 字节数 if (host.info->var.bits_per_pixel == 24) host.info->fix.smem_len = host.info->var.xres * host.info->var.yres * 4; /* fb的虚拟地址 */ host.info->screen_base = dma_alloc_writecombine(NULL, host.info->fix.smem_len, &phy_addr,GFP_KERNEL); host.info->fix.smem_start = phy_addr; /* fb的物理地址 */ host.phy_addr = phy_addr; host.info->fix.type = FB_TYPE_PACKED_PIXELS; host.info->fix.visual = FB_VISUAL_TRUECOLOR; host.info->fix.line_length = host.info->var.xres * host.info->var.bits_per_pixel / 8; if (host.info->var.bits_per_pixel == 24) host.info->fix.line_length = host.info->var.xres * 4; /* c. fbops */ host.info->fbops = &myfb_ops; host.info->pseudo_palette = pseudo_palette; /* 1.3 注册fb_info */ register_framebuffer(host.info); /* 1.4 硬件操作 */ //lcdif = ioremap(0x021C8000, sizeof(*lcdif)); res = platform_get_resource(pdev, IORESOURCE_MEM, 0); host.LCDIF = devm_ioremap_resource(&pdev->dev, res); lcd_controller_init(&host); lcd_controller_enable(host.LCDIF); gpiod_set_value(host.bl_gpio, 1); return 0; } static int mylcd_remove(struct platform_device *pdev) { /* 反过来操作 */ /* 2.1 反注册fb_info */ unregister_framebuffer(host.info); /* 2.2 释放fb_info */ framebuffer_release(host.info); //iounmap(mylcd_regs); return 0; } static const struct of_device_id mylcd_of_match[] = { { .compatible = "flyrobot,lcd_drv", }, { }, }; MODULE_DEVICE_TABLE(of, simplefb_of_match); static struct platform_driver mylcd_driver = { .driver = { .name = "mylcd", .of_match_table = mylcd_of_match, }, .probe = mylcd_probe, .remove = mylcd_remove, }; static int __init lcd_drv_init(void) { int ret; ret = platform_driver_register(&mylcd_driver); if (ret) return ret; return 0; } /* 2. 出口 */ static void __exit lcd_drv_exit(void) { platform_driver_unregister(&mylcd_driver); } module_init(lcd_drv_init); module_exit(lcd_drv_exit); MODULE_AUTHOR("www.flyrobot.net"); MODULE_DESCRIPTION("Framebuffer driver for the linux"); MODULE_LICENSE("GPL");
驱动验证
编译完后烧录设备树和内核到板子,启动板后可以通过下面的命令查看设备节点:
cd /sys/firmware/devicetree/base cd /sys/bus/platform/drivers/
应用程序如下:
#include <sys/mman.h> #include <sys/types.h> #include <sys/stat.h> #include <unistd.h> #include <linux/fb.h> #include <fcntl.h> #include <stdio.h> #include <string.h> #include <sys/ioctl.h> #include <time.h> static int fd_fb; static struct fb_fix_screeninfo fix; /* Current fix */ static struct fb_var_screeninfo var; /* Current var */ static int screen_size; static unsigned char *fb_base; static unsigned int line_width; static unsigned int pixel_width; /********************************************************************** * 函数名称: lcd_put_pixel * 功能描述: 在LCD指定位置上输出指定颜色(描点) * 输入参数: x坐标,y坐标,颜色 * 输出参数: 无 * 返 回 值: 会 * 修改日期 版本号 修改人 修改内容 * ----------------------------------------------- * 2020/05/12 V1.0 zh(angenao) 创建 ***********************************************************************/ void lcd_put_pixel(void *fb_base, int x, int y, unsigned int color) { unsigned char *pen_8 = fb_base+y*line_width+x*pixel_width; unsigned short *pen_16; unsigned int *pen_32; unsigned int red, green, blue; pen_16 = (unsigned short *)pen_8; pen_32 = (unsigned int *)pen_8; switch (var.bits_per_pixel) { case 8: { *pen_8 = color; break; } case 16: { /* 565 */ red = (color >> 16) & 0xff; green = (color >> 8) & 0xff; blue = (color >> 0) & 0xff; color = ((red >> 3) << 11) | ((green >> 2) << 5) | (blue >> 3); *pen_16 = color; break; } case 32: { *pen_32 = color; break; } default: { printf("can't surport %dbpp\n", var.bits_per_pixel); break; } } } void lcd_draw_screen(void *fb_base, unsigned int color) { int x, y; for (x = 0; x < var.xres; x++) for (y = 0; y < var.yres; y++) lcd_put_pixel(fb_base, x, y, color); } /* ./multi_framebuffer_test single * ./multi_framebuffer_test double */ int main(int argc, char **argv) { int i; int ret; int nBuffers; int nNextBuffer = 1; char *pNextBuffer; unsigned int colors[] = {0x00FF0000, 0x0000FF00, 0x000000FF, 0, 0x00FFFFFF}; /* 0x00RRGGBB */ struct timespec time; time.tv_sec = 0; time.tv_nsec = 100000000; if (argc != 2) { printf("Usage : %s <single|double>\n", argv[0]); return -1; } fd_fb = open("/dev/fb0", O_RDWR); if (fd_fb < 0) { printf("can't open /dev/fb0\n"); return -1; } if (ioctl(fd_fb, FBIOGET_FSCREENINFO, &fix)) { printf("can't get fix\n"); return -1; } if (ioctl(fd_fb, FBIOGET_VSCREENINFO, &var)) { printf("can't get var\n"); return -1; } line_width = var.xres * var.bits_per_pixel / 8; pixel_width = var.bits_per_pixel / 8; screen_size = var.xres * var.yres * var.bits_per_pixel / 8; nBuffers = fix.smem_len / screen_size; printf("nBuffers = %d\n", nBuffers); fb_base = (unsigned char *)mmap(NULL , fix.smem_len, PROT_READ | PROT_WRITE, MAP_SHARED, fd_fb, 0); if (fb_base == (unsigned char *)-1) { printf("can't mmap\n"); return -1; } if ((argv[1][0] == 's') || (nBuffers == 1)) { while (1) { /* use single buffer */ for (i = 0; i < sizeof(colors)/sizeof(colors[0]); i++) { lcd_draw_screen(fb_base, colors[i]); nanosleep(&time, NULL); } } } else { /* use double buffer */ /* a. enable use multi buffers */ var.yres_virtual = nBuffers * var.yres; ioctl(fd_fb, FBIOPUT_VSCREENINFO, &var); while (1) { for (i = 0; i < sizeof(colors)/sizeof(colors[0]); i++) { /* get buffer */ pNextBuffer = fb_base + nNextBuffer * screen_size; /* set buffer */ lcd_draw_screen(pNextBuffer, colors[i]); /* switch buffer */ var.yoffset = nNextBuffer * var.yres; ioctl(fd_fb, FBIOPAN_DISPLAY, &var); ret = 0; ioctl(fd_fb, FBIO_WAITFORVSYNC, &ret); nNextBuffer = !nNextBuffer; nanosleep(&time, NULL); } } } munmap(fb_base , screen_size); close(fd_fb); return 0; }